Robot calibrate method based on particle swarm optimization
A technology of particle swarm optimization and calibration method, which is applied in the field of calibration, can solve the problem that the error model optimization solution accuracy and speed are not covered by relevant literature, and achieve the effect of fast optimization solution and improved calibration accuracy and speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In view of the above, it is necessary to provide an accurate and fast optimization solution method based on the existing robot kinematics error model, so as to achieve the purpose of improving the calibration accuracy and speed.
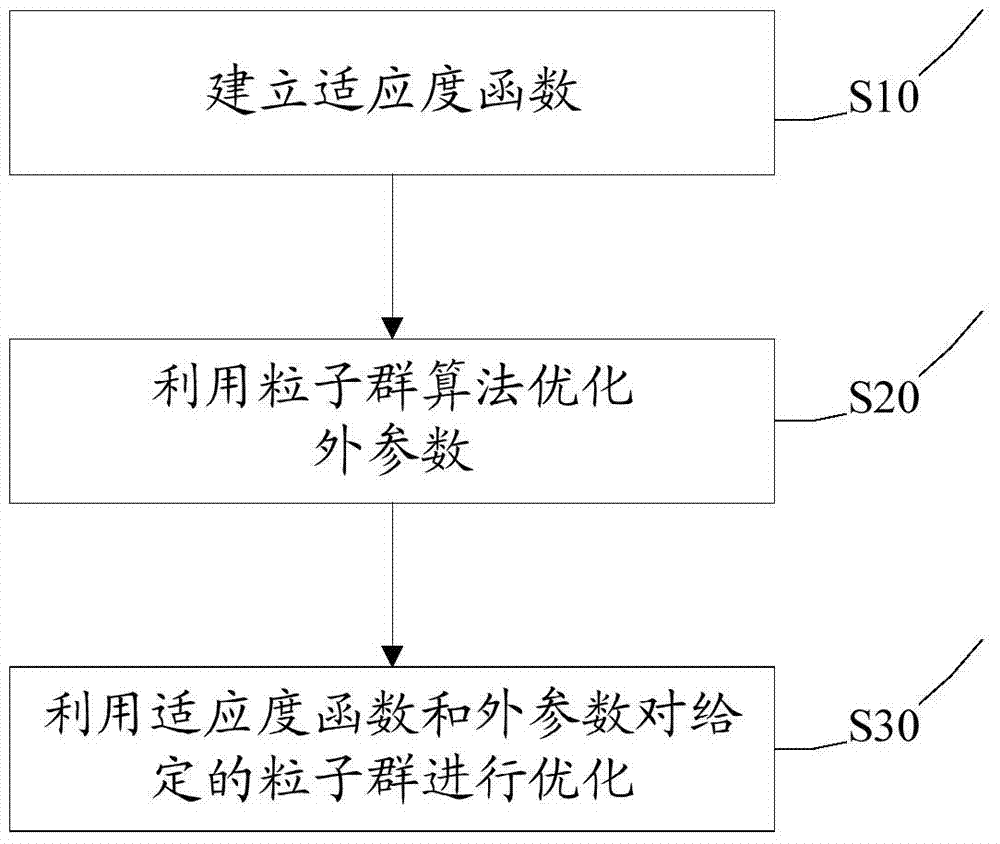
[0028] A robot calibration method based on particle swarm optimization, such as figure 1 As shown, the method includes the following steps:
[0029] S10: Establish a fitness function;
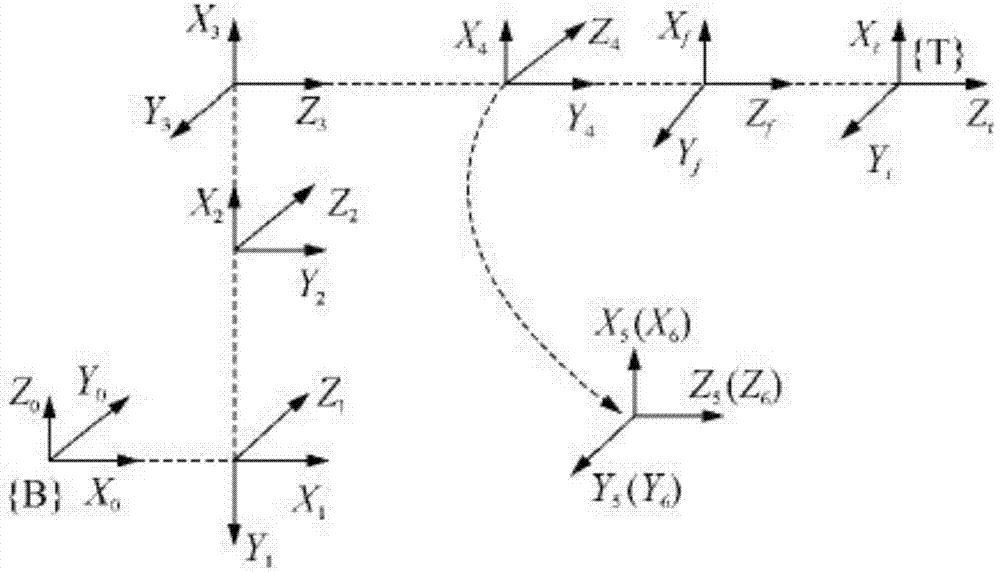
[0030] Such as figure 2 As shown, the fitness function is established. The fitness function is the final evaluation function of the particle swarm algorithm, which determines the optimization process and optimization direction of the particle swarm algorithm. According to the fitness value of each individual in each generation, the individual’s The degree of pros and cons, for the six degrees of freedom laser measuring instrument used, the position and attitude of the target are obtained at the same time, so as to obtain the end pose error, the fitness funct...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com