

FPGA-based dynamic motion decoding trigger
A trigger and starting signal technology, applied in the direction of instruments, simulators, computer control, etc., can solve the problems of difficult to achieve the accuracy requirement of the acquisition cycle, the mismatch between the beginning and the end of the experimental data, and the inability to process the experimental data, etc., to achieve performance improvement and high efficiency , good stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
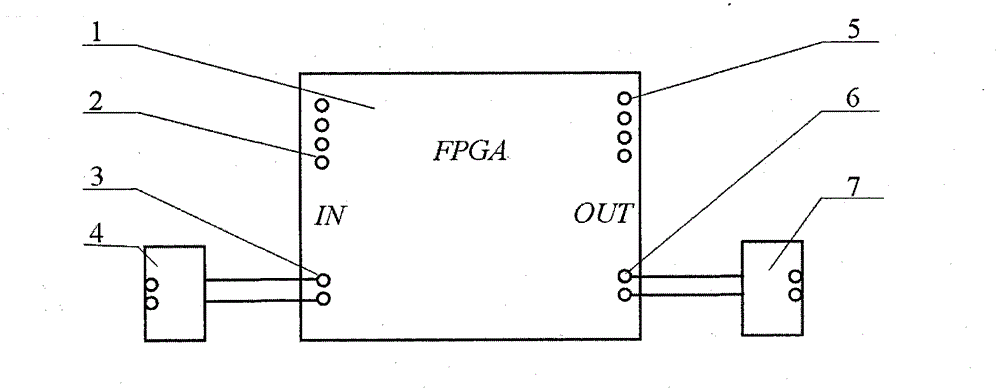
[0010] according to figure 1 As shown, a dynamic motion decoding trigger based on FPGA includes FPGA module 1, input signal level conversion circuit 4, DA circuit and pulse optocoupler conversion circuit 7, and the start of input signal level conversion circuit 4 and FPGA module 1 The signal input terminal 3 is connected, the pulse signal output terminal 6 of the FPGA module 1 is connected to the pulse optocoupler conversion circuit 7, the pulse optocoupler conversion circuit 7 is connected to the acquisition trigger terminal of the acquisition system, and the position signal output terminal 5 of the FPGA module 1 is connected to the DA The circuit is connected, the DA circuit is connected with the acquisition system, the external control system inputs the starting signal, and the input signal level conversion circuit 4 converts it into the identification voltage of the FPGA module 1; the position signal of the model is input to the encoder signal of the FPGA module 1 through t...
Embodiment 2
[0012] During the wind tunnel experiment, the encoder of the motion system is connected to the encoder signal input terminal 2, the "initial acquisition signal" output by the motion system is connected to the input signal level conversion circuit 4, and the position signal output terminal 5 of the decoding trigger It is connected to the position acquisition channel of the acquisition system, and the pulse optocoupler conversion circuit 7 of the decoding trigger is connected to the acquisition trigger end of the acquisition system. After the above connection is completed, the experiment is carried out.
[0013] For example, if the movement period of the model is 1s, it is required to collect 240 points every week for 22 weeks, and collect regularly. The following settings can be made:
[0014] The inventive device sets the model motion frequency to 1 Hz, collects 240 points every week, and the number of collection points is 22×240=5280 points. After the motion system starts to m...
Embodiment 3
[0017] The following describes the application of the system to the static motion system of the wind tunnel experiment.
[0018] The static motion system experiment requires the model to be in place, and the acquisition system collects multiple sets of experimental data and then averages them. The acquisition settings for this device are as follows
[0019] The invention equipment sets the model movement frequency to 1Hz, collects 1000 points every week, and collects 1000 points. In this way, after the model is in place, it collects 1s and collects 1000 points in total. After the data is collected by the collection system, it performs mean value processing. Every time the model reaches a position, it outputs a pulse signal to the inventive device, so that the data collection of the whole static experiment is completed.
[0020] The core technology platform of the device of the present invention is an FPGA module, i.e. a Field Programmable Gate Array (FPGA). The module includes...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More