

Robot joint torque limiting device
A technology of robot joints and limiting devices, applied in the field of robots, can solve the problems of limited transmission torque, high precision and small size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The robot joint torque limiting device according to the present invention will be described in detail below with reference to the accompanying drawings.
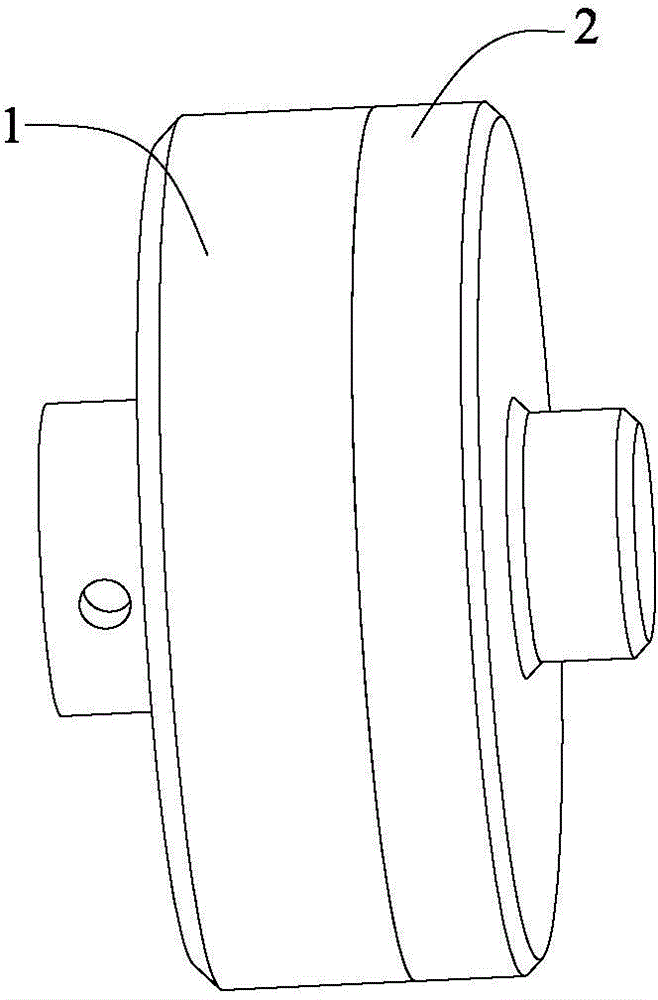
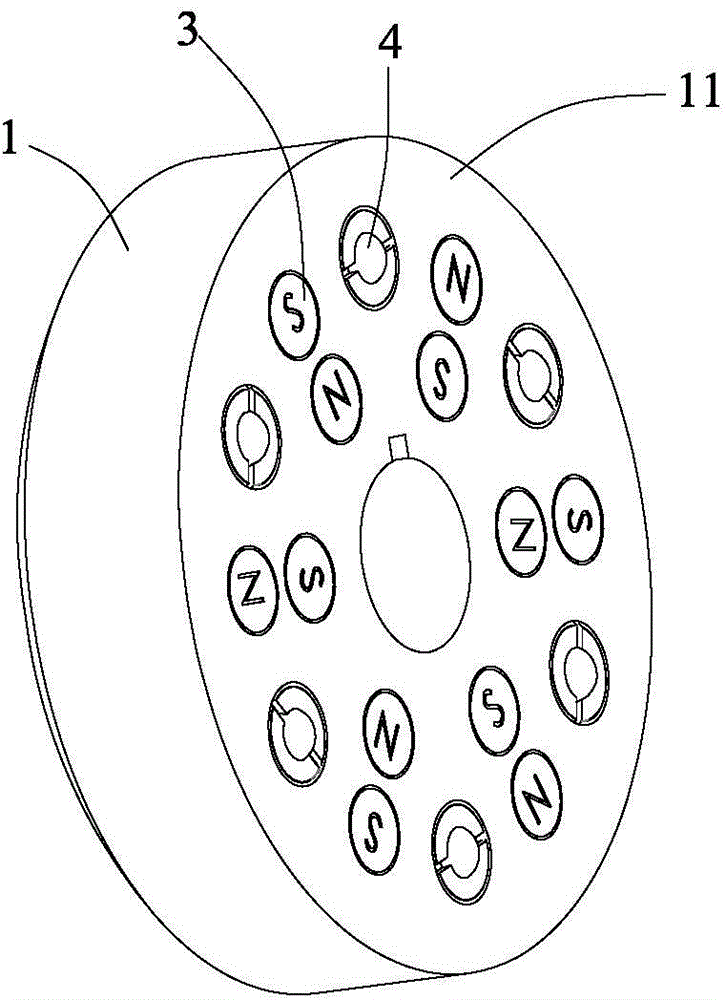
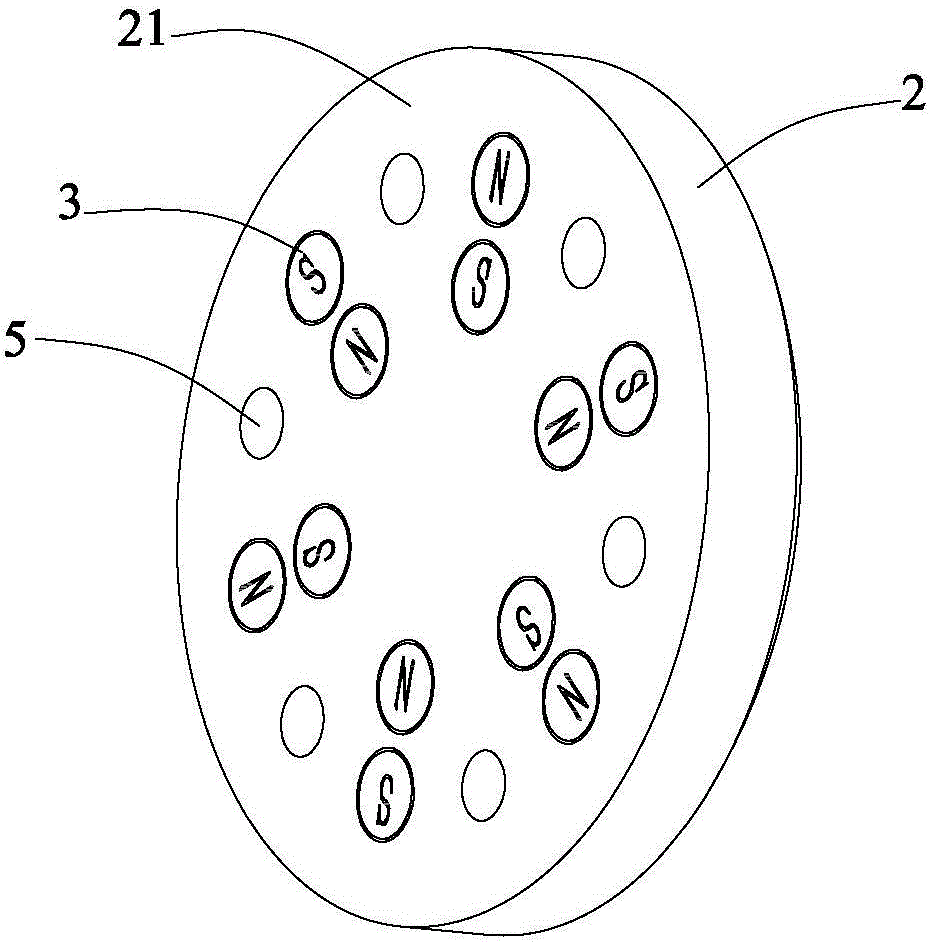
[0018] refer to Figure 1 to Figure 4 , the robot joint torque limiting device according to the present invention includes: an input disk 1, connected to a power input shaft (not shown); an output disk 2, coaxial with the input disk 1, connected to a power output shaft (not shown); The permanent magnet 3 is evenly arranged on the end face 11 of the input disk 1 opposite to the output disk 2, the magnetic pole (N pole or S pole) of the permanent magnet 3 faces the output disk 2, and the magnetic pole of the adjacent permanent magnet 3 The direction is opposite; a plurality of ball plungers 4 are fixedly arranged on the end face 11 of the input disk 1 provided with a permanent magnet 3, and the ball head of the ball plunger 4 is exposed on the end face 11; and a plurality of ball sockets 5, the number The same number a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More