

Mars ultimate approach segment autonomous navigation method based on multi-source information fusion
A multi-source information fusion and autonomous navigation technology, applied in the field of autonomous navigation during the final approach to Mars, which can solve the problems that measurement information cannot be obtained in real time, it is difficult to ensure real-time autonomous navigation of probes, and the number of orbiters is limited.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
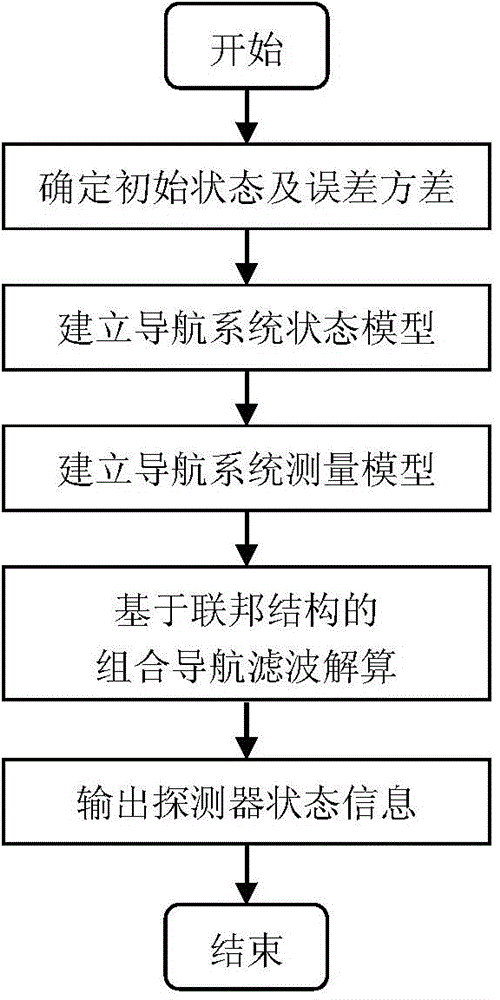
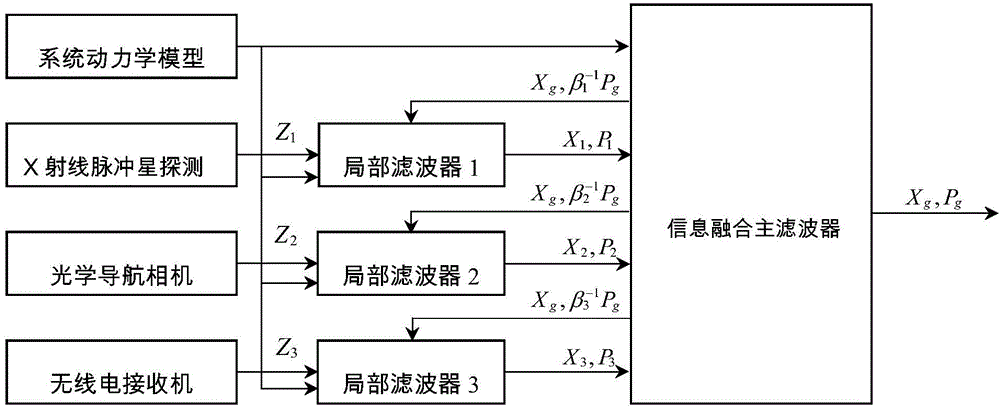
[0069] For the final approach to Mars, this example uses optical measurement, radio measurement based on an orbiter, and measurement information from three pulsars, combined with a combined navigation filtering method based on federated filtering, and uses the Extended Kalman Filter algorithm (EKF) as the local filter The detector estimates the position and speed state of the detector to realize high-precision real-time autonomous navigation. The specific implementation method of this example is as follows:
[0070] Step 1: Establish a state model for the Mars final approach segment.
[0071] The state model of the detector is established in the heliocentric inertial coordinate system. The state vector of the detector is the position vector r s =[r x ,r y ,r z ] T and velocity vector v s =[v x ,v y ,v z ] T . Considering the gravitational force of the sun, the gravitational force of Mars and other perturbing forces, the state model of the Mars final approach stage ...
Embodiment 2
[0122] For the final approach to Mars, this example uses optical measurements, radio measurements based on an orbiter, and three pulsar measurement information, combined with a combined navigation filtering method based on federated filtering, and uses the Unscented Kalman Filter algorithm (UKF) as the local The filter estimates the position and speed state of the detector to realize high-precision real-time autonomous navigation. The specific implementation method of this example is as follows:
[0123] Step 1: Establish a state model for the Mars final approach segment.
[0124] The state model of the detector is established in the heliocentric inertial coordinate system. The state vector of the detector is the position vector r s =[r x ,r y ,r z ] T and velocity vector v s =[v x ,v y ,v z ] T . Considering the gravitational force of the sun, the gravitational force of Mars and other perturbing forces, the state model of the Mars final approach stage probe is est...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More