Hybrid five-degree-of-freedom minimally invasive surgical robotic arm
A minimally invasive surgery, degree of freedom technology, applied in the field of robotics, can solve problems such as the decline in the execution accuracy of the robotic arm manipulator, hinder the development of robotic automated surgery, increase manufacturing and assembly costs, etc., to achieve good motion isotropy, all directions The effect of good homogeneity of motion and precise operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
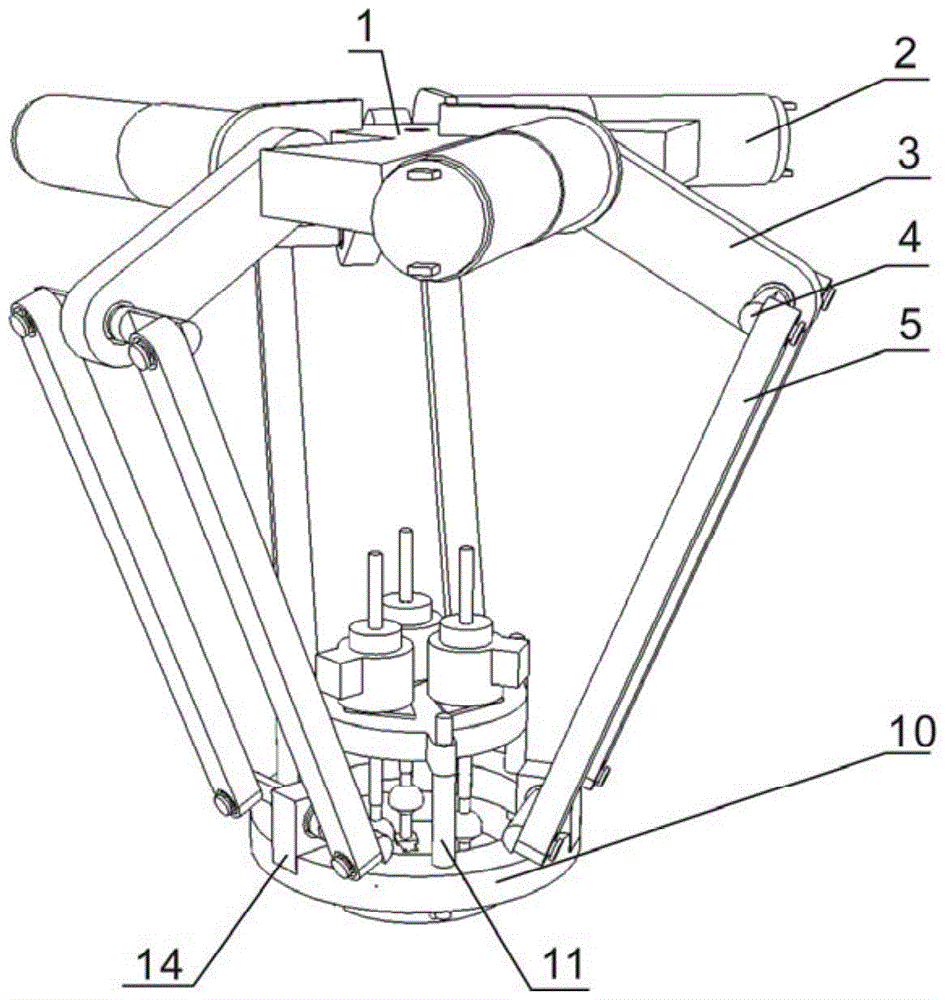
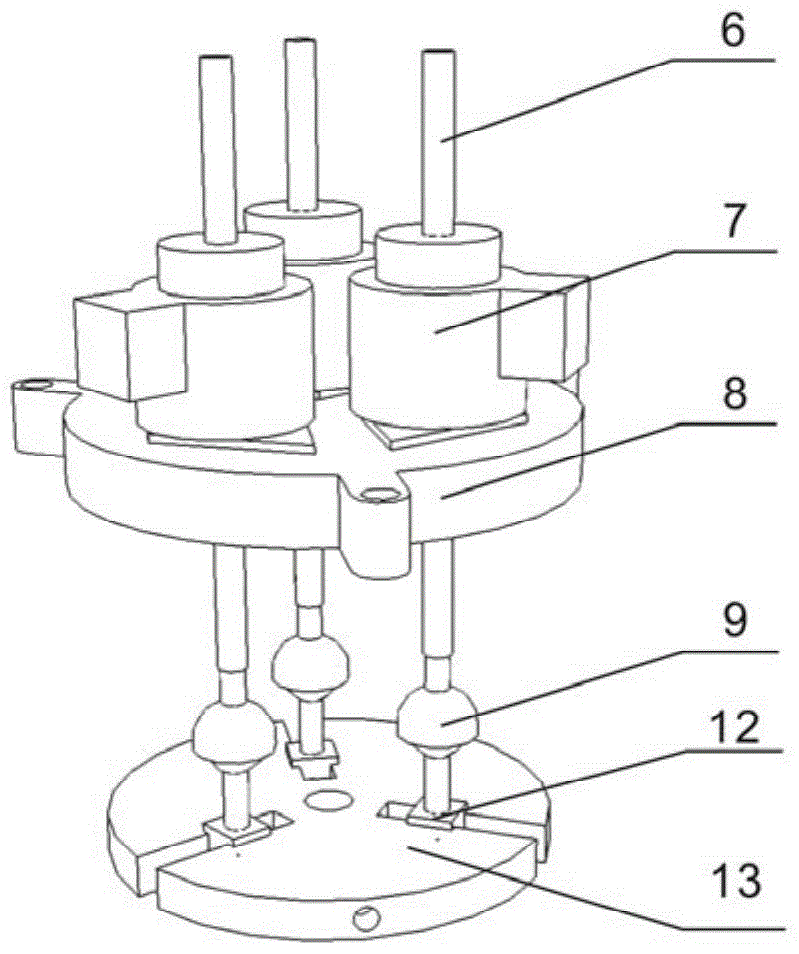
[0020] see figure 1 , see also figure 2 , the hybrid five-degree-of-freedom minimally invasive surgical robotic arm of the present invention includes a main fixed platform 1 , an active platform 10 , a flip fixed platform 8 and a working movable platform 13 . The main fixed platform 1 and the active platform 10 are connected by three first motion branches with the same structure to form a first closed-loop three-degree-of-freedom parallel mechanism. The branch chain connection constitutes a second closed-loop three-degree-of-freedom parallel mechanism; and the working moving platform is embedded in the center hole of the active platform, and the second closed-loop three-degree-of-freedom parallel mechanism is enclosed by the first closed-loop three-degree-of-freedom parallel mechanism; The platform and the overturned static platform are fixedly connected by three uprights 11, and two closed-loop three-degree-of-freedom parallel mechanisms are connected in series to form a hy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More