

Thoracentesis robot based on CT or MRI image navigation
A surgical robot and thoracic technology, applied in the field of medical devices, can solve the problems of low accuracy and slow adjustment speed, and achieve the effects of high positioning accuracy, fast positioning speed, and pain relief.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] In order to further understand the invention content, characteristics and effects of the present invention, the following examples are given, and detailed descriptions are as follows in conjunction with the accompanying drawings:
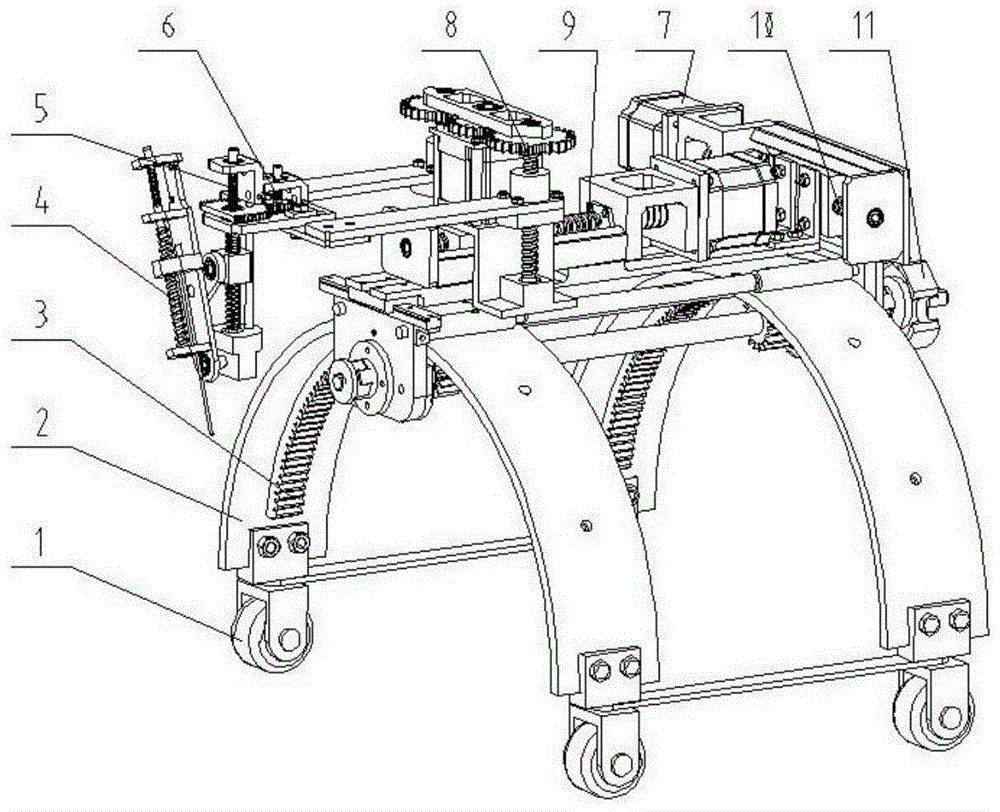
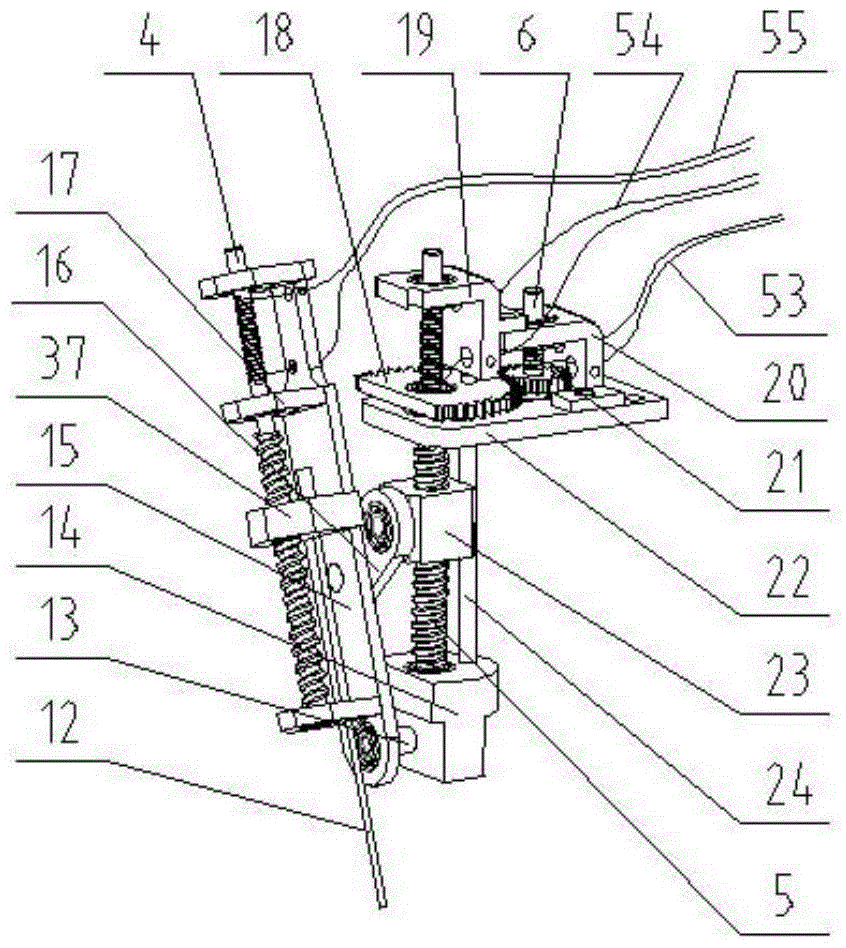
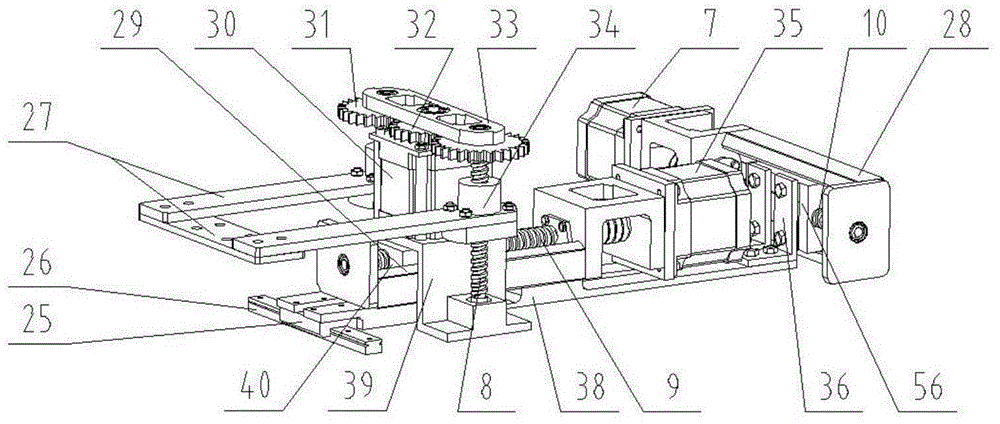
[0019] see Figure 1 to Figure 5 , a thoracentesis surgery robot based on CT or MRI image navigation, including an arc-shaped support module, a three-way translation module and an angle adjustment module.
[0020] see figure 1 with Figure 4 ~ Figure 5 , the arc-shaped bracket module includes two arc-shaped plates 2 which are respectively arranged at the front end and the rear end of the robot, and the two arc-shaped plates 2 are connected by two foot stabilizing plates 42 arranged longitudinally, and each arc The inner side of the shaped plate 2 is fixedly connected with an incomplete internal gear 3; the front end vertical main board 45 is provided in front of the said arc plate 2 at the front end, and the rear end is provided behind the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More