

Self-adaptative inverse decoupling control method based on non-linear filters for bearing-free asynchronous motor
A nonlinear filter, asynchronous motor technology, applied in the direction of motor generator control, electronic commutation motor control, control system, etc., can solve the problems of lack of patent materials, motor structure, control method, difference in control requirements, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The technical scheme that the present invention adopts is to adopt following steps:
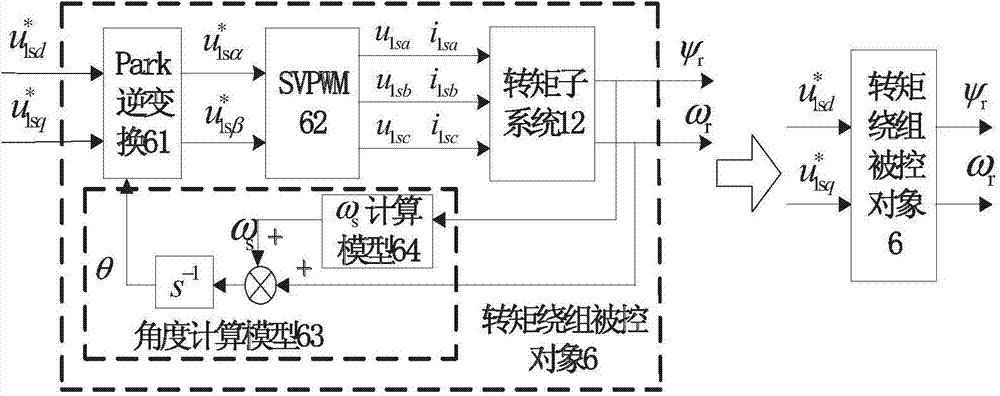
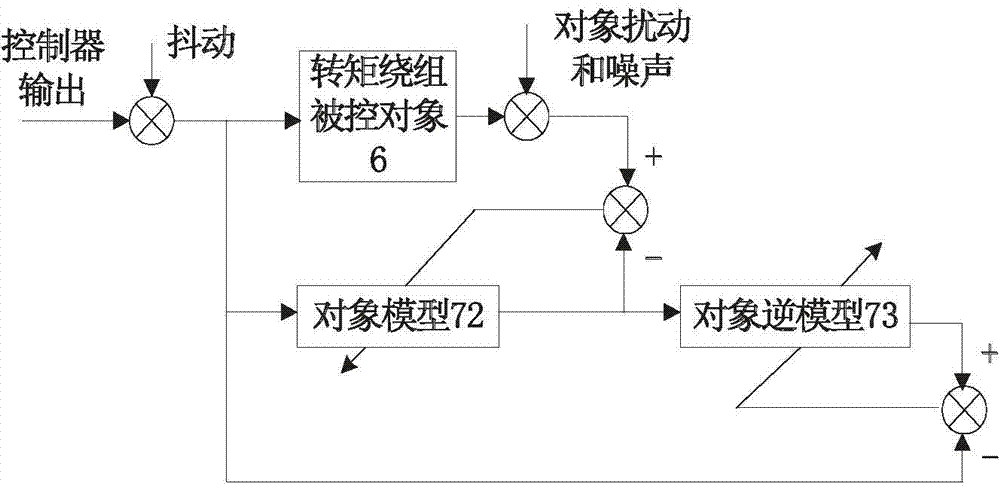
[0040] 1) The torque control subsystem 7 first takes the Park inverse transform 61, the space vector pulse width modulation inverter (SVPWM) 62, the angle calculation model 63, and the torque subsystem 12 as a whole to construct the torque winding controlled object 6, The inverse Park transform 61 , the space vector pulse width modulation inverter 62 and the torque subsystem 12 are sequentially connected in series, and the transformation angle required by the Park inverse transform 61 is obtained by the angle calculation model 63 . The input of the torque winding controlled object 6 is the input of the Park inverse transformation 61, which is the difference between the output of the adaptive inverse controller 71 and the output of the object inverse model 73. The first set of outputs is the rotor angular velocity and the rotor flux linkage, and the second set of outputs is the voltage ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More