

Obstacle avoidance robot based on visual feature binding and reinforcement learning theory
A technology of reinforcement learning and visual features, applied in the direction of two-dimensional position/channel control, etc., can solve complex application process and other problems, and achieve the effect of rich information and good uniqueness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
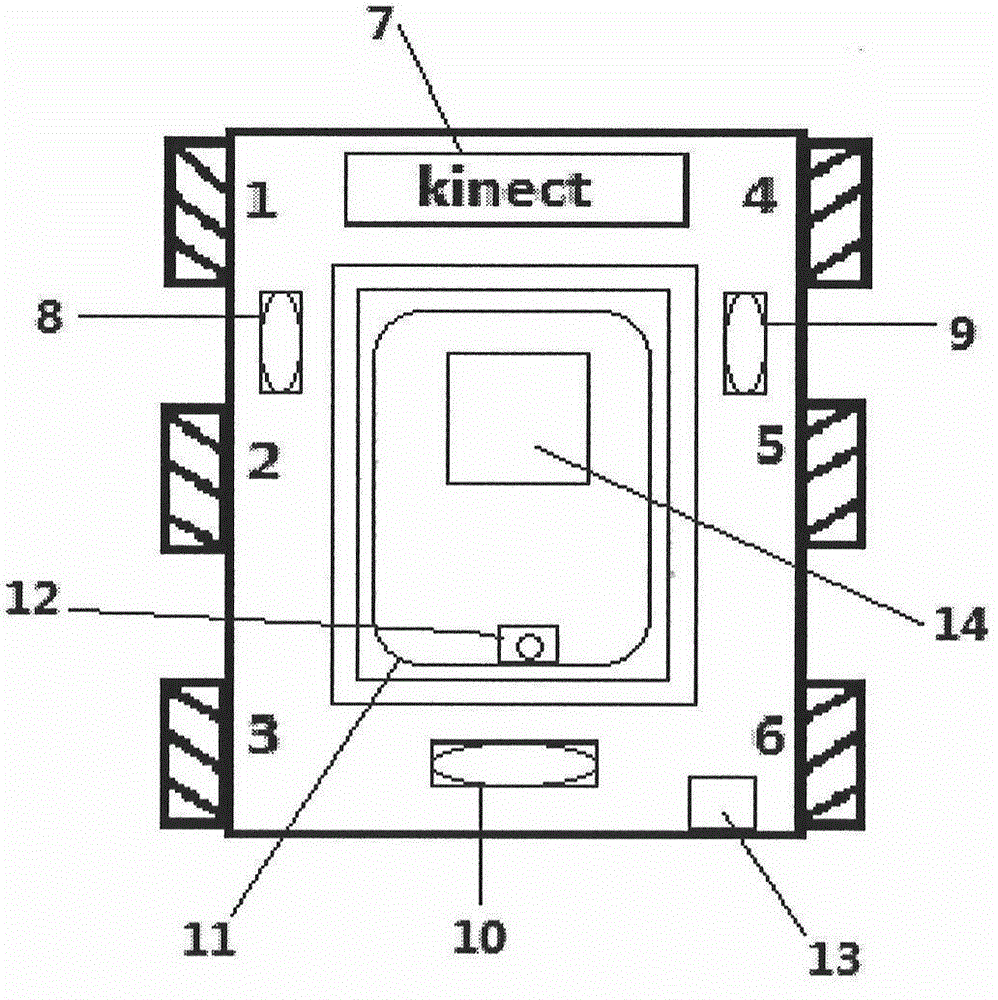
[0165] The present invention is an obstacle-avoiding robot based on visual feature bundling and reinforcement learning theory, and its specific implementation is as follows. The invention consists of a host module, Kinect RGB and depth cameras, a stm32 robot control module, a radio receiving module, a motor drive module, a serial port communication module and an intelligent robot body structure.
[0166] The image acquisition part is collected by kinect (7). Use RGB camera and infrared depth camera in kinect (7) to collect image data, get real-time image with RGBD information, and provide PC host for analysis and processing.
[0167] The robot communication part uses the RS-232 (12) serial communication interface to transmit the control signal generated after the host computer processes and recognizes the image. Realize the real-time wired communication between the host computer and the robot control module, and ensure the stable transmission of control signals.
[0168] The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More