

Underactuated anthropomorphic three-fingered manipulator
An underactuated, manipulator technology, applied in the field of robotic equipment and multi-fingered manipulators, can solve problems such as increasing system complexity and research difficulty, achieving low grasping control difficulty, reducing complexity and research difficulty, and high reliability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] Preferred embodiments of the present invention are described in detail as follows:
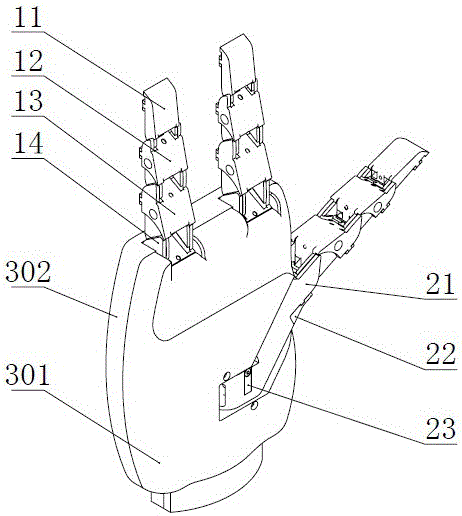
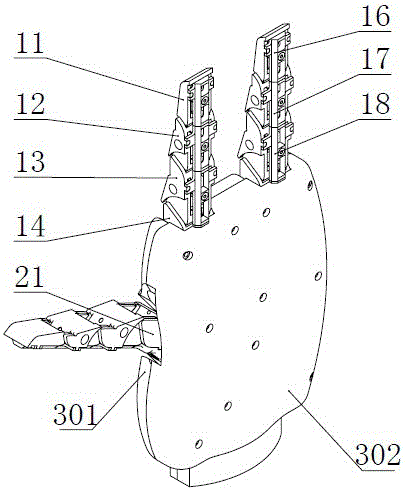
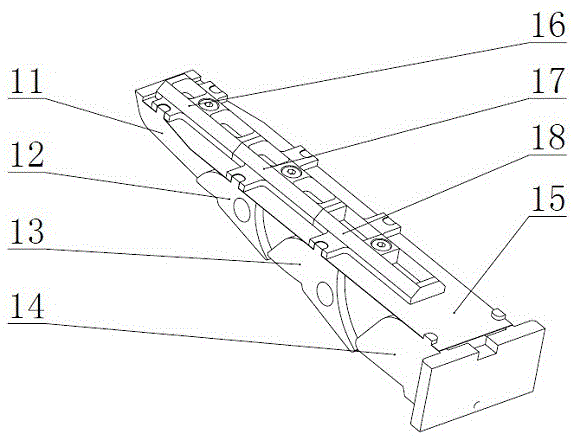
[0028] In this example, see Figure 1-10, an underactuated humanoid three-finger manipulator, including a palm unit 3 and 3 fingers, the palm unit 3 includes a palm 301 and a palm back 302, one of the fingers is a thumb, and the palm unit 3 is provided with 3 driving fingers to bend fingers Micro DC motor 303 and a steering gear 306 for swinging the thumb, the winding 304 is fixedly installed on the output shaft of the micro DC motor 303, each finger all has a finger unit 1, and the finger unit 1 consists of the first phalanx 11, the second knuckle in turn. The second phalanx 12, the third phalanx 13 and the fourth phalanx 14 are connected, and a rotation shaft is arranged between two adjacent phalanxes, so that the finger unit 1 forms a finger joint system with three degrees of freedom, and the fourth phalanx 14 is fixedly connected to the edge of the palm unit 3, and one end of the t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More