

Transformer substation patrol robot based on multi-sensor data fusion picture composition and method thereof
An inspection robot and data fusion technology, applied to instruments, measuring devices, surveying and mapping, and navigation, etc., can solve problems such as heavy workload, complex schemes, and fuzzy reference standards, and achieve reduced cumulative errors, good feasibility, and simple schemes Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0054] Below in conjunction with accompanying drawing and embodiment the present invention will be further described:
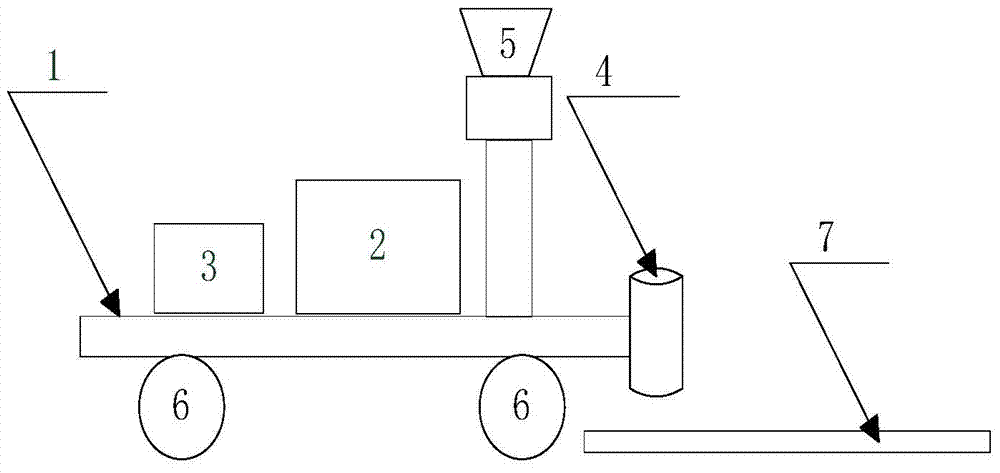
[0055] figure 1 Among them, a substation inspection robot based on multi-sensor data fusion technology composition, which includes a robot mobile platform 1, on which there are industrial computer 2, odometer 3, visual acquisition device 4, laser radar 5, and driving wheels 6 of the mobile platform , there is marking line 7 on the ground.
[0056] Described robot mobile platform 1, this embodiment is a wheeled mobile platform form, and its characteristic is that mobile platform has several driving wheels 6;
[0057] Described industrial computer 2 is characterized in that it is a computer carried on the robot mobile platform;
[0058] The odometer 3 is characterized in that it receives the speed sensor signal and is connected with the industrial computer through the communication line;
[0059] The described visual acquisition device 4 is characterized in ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More