

Lasso drive based upper limb rehabilitation exoskeleton robot
A technology for exoskeleton robots and upper limbs, applied in passive exercise equipment, physical therapy, etc., can solve problems such as falling of affected limbs, increasing the overall load of the system, performance requirements of power consumption driving components, and reducing control accuracy, etc., to reduce power consumption , Realize the effect of lightweight structure design and overall bulky mechanism
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The technical solution of the present invention will be described in detail below in conjunction with the embodiments and the drawings of the specification.
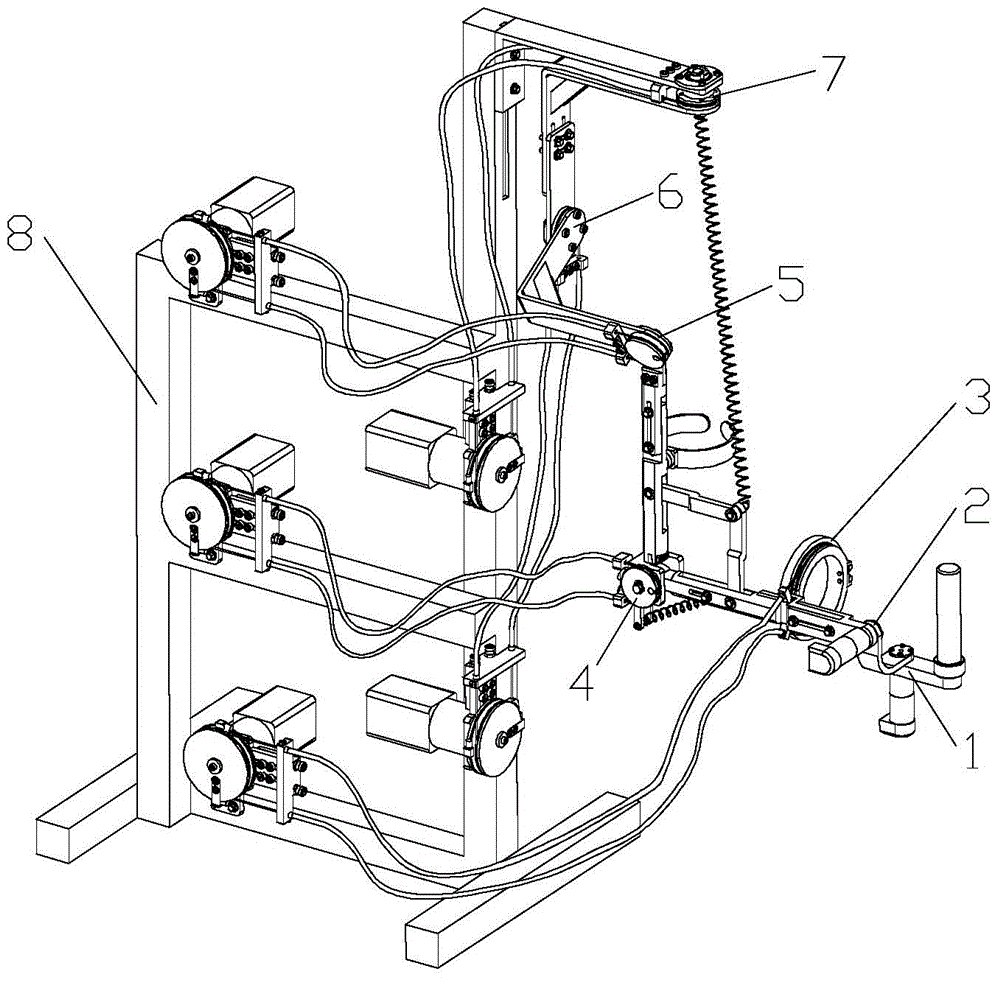
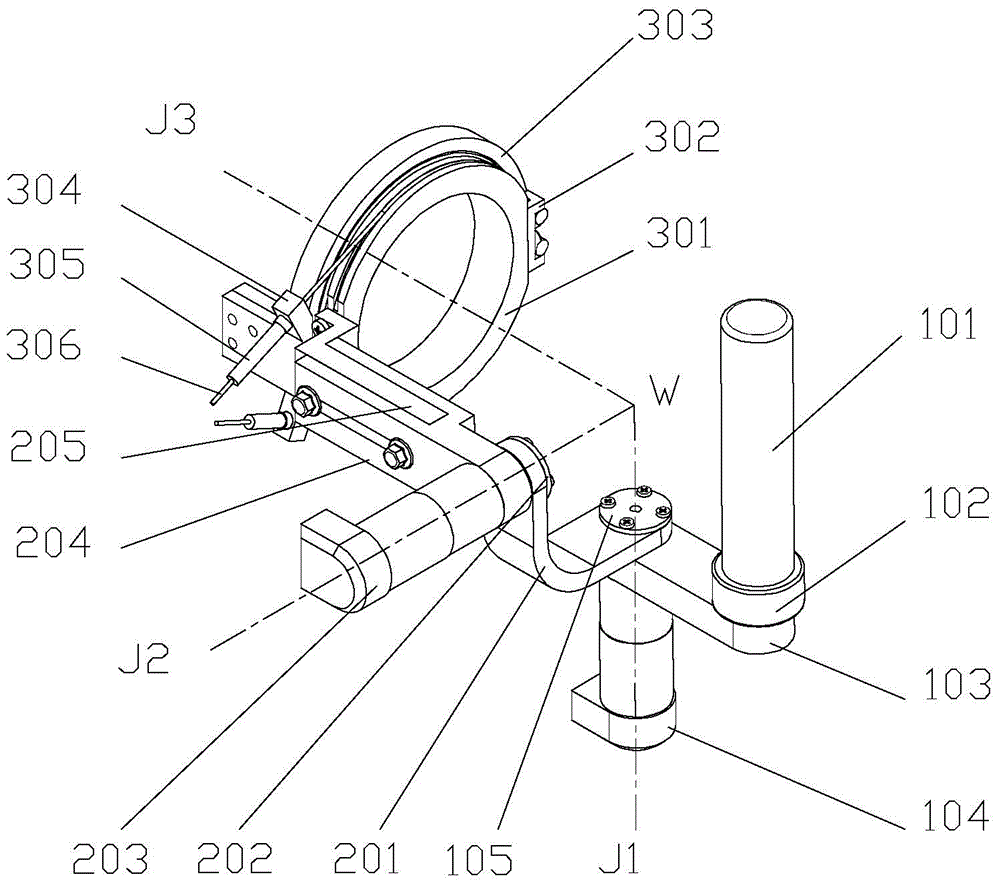
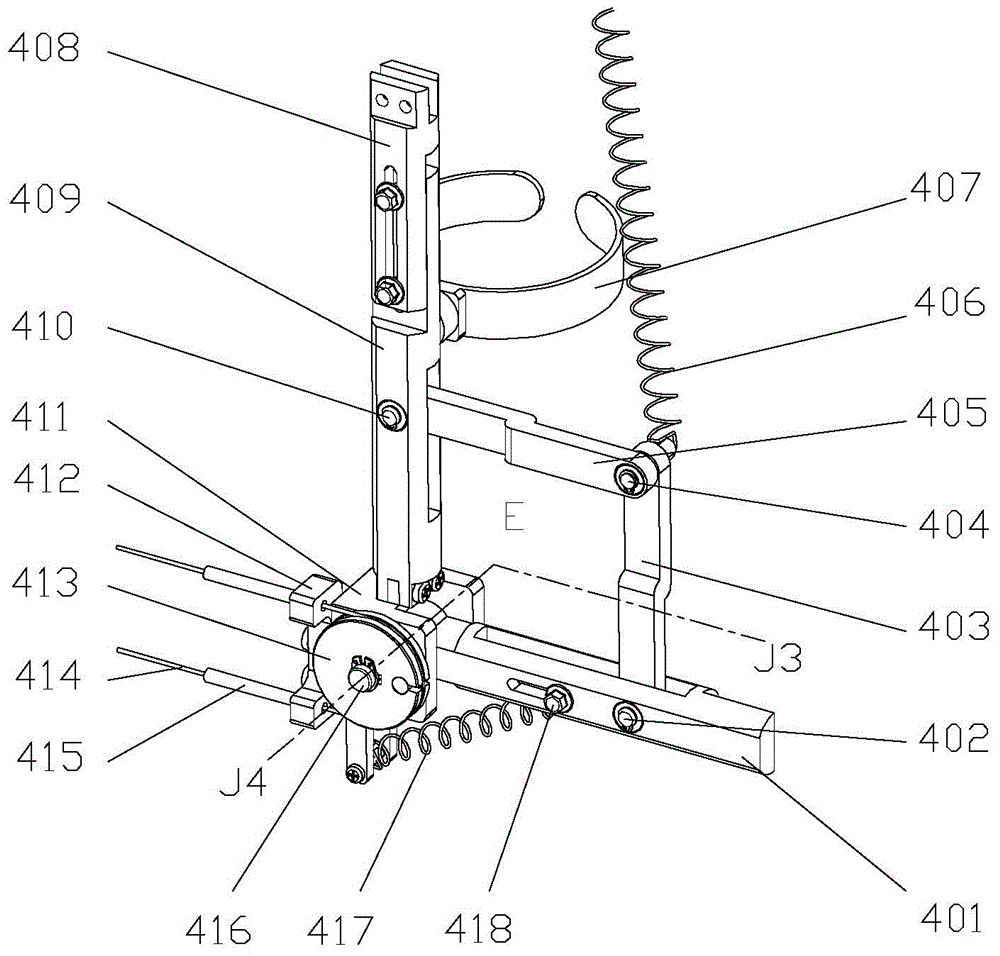
[0032] Such as Figure 1 to Figure 6 As shown, a lasso-driven upper limb rehabilitation exoskeleton robot, the mechanism includes wrist outward swing / adduction joints 1, wrist flexion / posterior extension joints 2, wrist internal rotation / external rotation joints connected in sequence 3. Elbow flexion / extension joint 4, shoulder flexion / extension joint 5, shoulder extension / adduction joint 6, shoulder internal rotation / external rotation joint 7, and, respectively, and the wrist Internal rotation / external rotation joint 3, elbow flexion / extension joint 4, shoulder flexion / extension joint 5, shoulder external swing / adduction joint 6 and shoulder rotation internal / external rotation joint 7 In the lasso driving device 8, the elbow flexion / extension joint 4 is also connected with the shoulder internal rotation / external rot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More