

Multi-wing sail polar exploration robot
A technology of robot and installation mechanism, which is applied in the field of detection robot to achieve the effect of simple control, flexible robot movement and sufficient power source
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
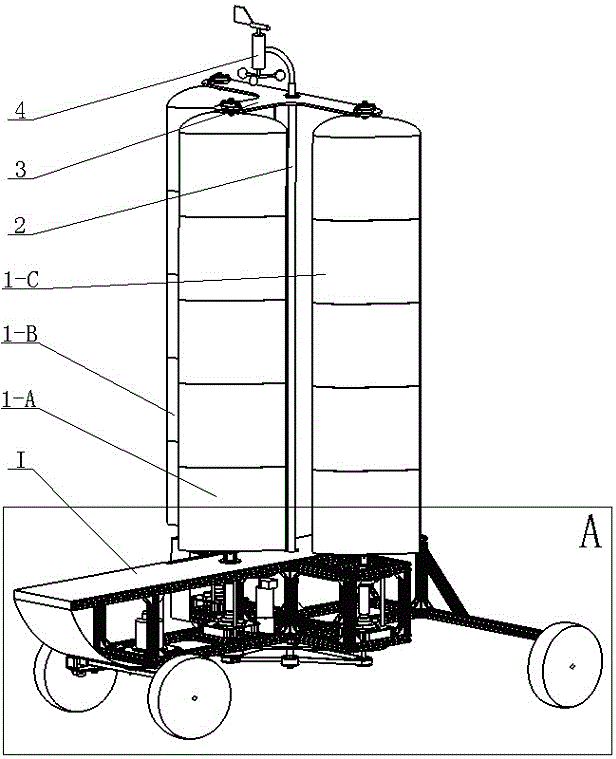
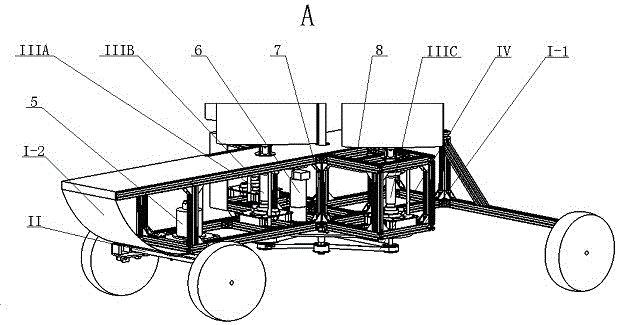
[0028] refer to Figure 1 ~ Figure 3 , the multi-wing sail polar detection robot, which includes a hull I, a front wheel steering mechanism II, a wing sail synchronous rotation mechanism IV, three wing sail rotation installation mechanisms IIIA, IIIB, IIIC, three wing sails 1-A , 1-B, 1-C, a bottom wing sail positioning plate 7, a middle wing sail positioning plate 8, a top wing sail positioning plate 3 and a wind direction anemometer 4. The front wheel steering mechanism II is a parallelogram mechanism, which is fixedly installed on the hull I with screws and T-shaped nuts, and the front wheel steering mechanism II is driven by the steering gear 5 to realize a multi-wing sail polar detection robot Turning movement around axis Z. The sails 1-A, 1-B, and 1-C are fixed to the sail rotation installation mechanisms IIIA, IIIB, and IIIC respectively through ring screw groups, and the sail rotation installation mechanisms IIIA, IIIB, and IIIC use keys and The shaft retaining ring ...
Embodiment 2
[0030] This embodiment is basically the same as Embodiment 1, and the special features are as follows:
[0031] The hull I is formed by screwing a hull I-1 and a hull I-2; according to the distribution characteristics of the word "product" of the airfoils 1-A, 1-B, and 1-C, The hull I-1 is a "ten"-shaped frame structure constructed of aluminum profiles, and the front end of the hull I-2 adopts an arc-shaped structure.
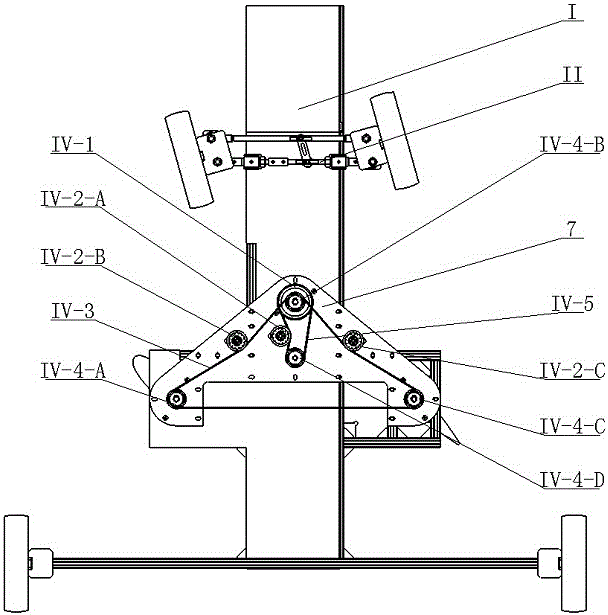
[0032] Said wing-sail synchronous rotation mechanism IV is: a small pulley IV-4-D connects a large pulley IV-1 through a short synchronous belt IV-5, and said large pulley IV-1 and a small pulley IV -4-B coaxial installation, the small pulley IV-4-B connects two small pulleys IV-4-A and IV-4-C through a long synchronous belt IV-3; the servo motor 6 drives The small pulley IV-4-D realizes the synchronous rotation of the large pulley IV-1 and the small pulleys IV-4-A, IV-4-B, and IV-4-C, that is, the sail Synchronous rotation between 1-A, 1-B, and 1-C; a tensio...
Embodiment 3
[0036] Such as figure 1 As shown, the hull I is formed by screwing a hull I-1 and a hull I-2; the hull I-1 is a "ten"-shaped frame structure constructed of aluminum profiles, It is easy to install the control system, power supply system and sensor system and can reduce its own mass. The robot has small inertia and good start-stop performance; the front end of the hull I-2 adopts an arc structure, and the air resistance is small when the robot moves forward.
[0037] A wind direction anemometer 4 is fixedly connected with the top wing sail positioning plate 3, and the wind direction anemometer 9 obtains the information of the ambient wind in real time, and feeds back to the control system to make the servo motor 6 drive the small pulley IV-4-D , the small pulley IV-4-D is connected to a large pulley IV-1 through a short synchronous belt IV-5, and the large pulley IV-1 is coaxially installed with a small pulley IV-4-B, so Described small pulley IV-4-B connects two small pulleys...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More