

Two-freedom degree motion-decoupling flexible hinge mechanism
A technology of flexible hinges and degrees of freedom, applied in the direction of generators/motors, piezoelectric effect/electrostrictive or magnetostrictive motors, electrical components, etc., can solve the difficulty of increasing the processing and assembly of mechanisms and increase the quality of moving parts of mechanisms , Decoupling performance is difficult to meet the requirements and other issues, to achieve the effect of compact structure, improved motion accuracy, and large bending stiffness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
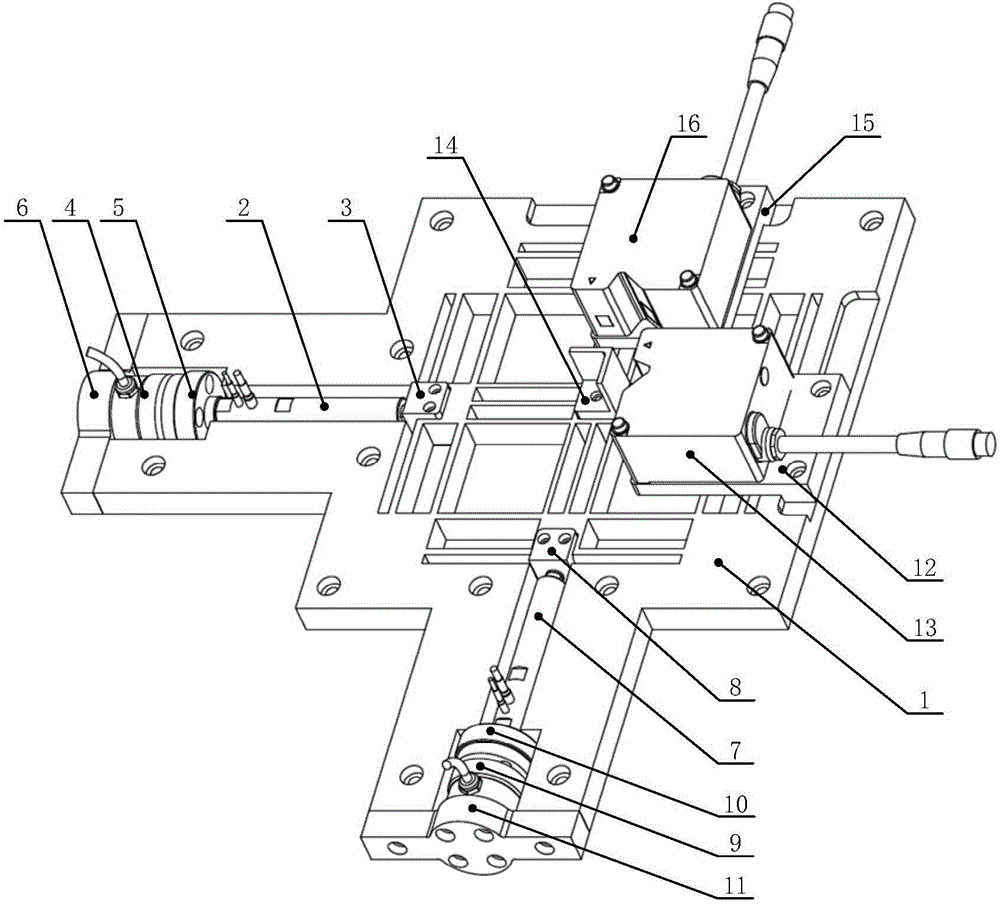
[0032] The present invention will be described in detail below in conjunction with the accompanying drawings.
[0033] First, the component names in the reference numerals will be explained.
[0034] 1 flexible hinge base;
[0035] 2 the first piezoelectric ceramic actuator;
[0036] 3 first actuator connector;
[0037] 4 the first tension pressure sensor;
[0038] 5 the first flange;
[0039] 6 the first compression cover;
[0040] 7 the second piezoceramic actuator;
[0041] 8 Second actuator connector;
[0042] 9 second tension pressure sensor;
[0043] 10 second flange;
[0044] 11 second compression cover;
[0045] 12 the first mount;
[0046] 13 the first laser displacement sensor;
[0047] 14 measuring base;
[0048] 15 second mount;
[0049] 16 second laser displacement sensor;
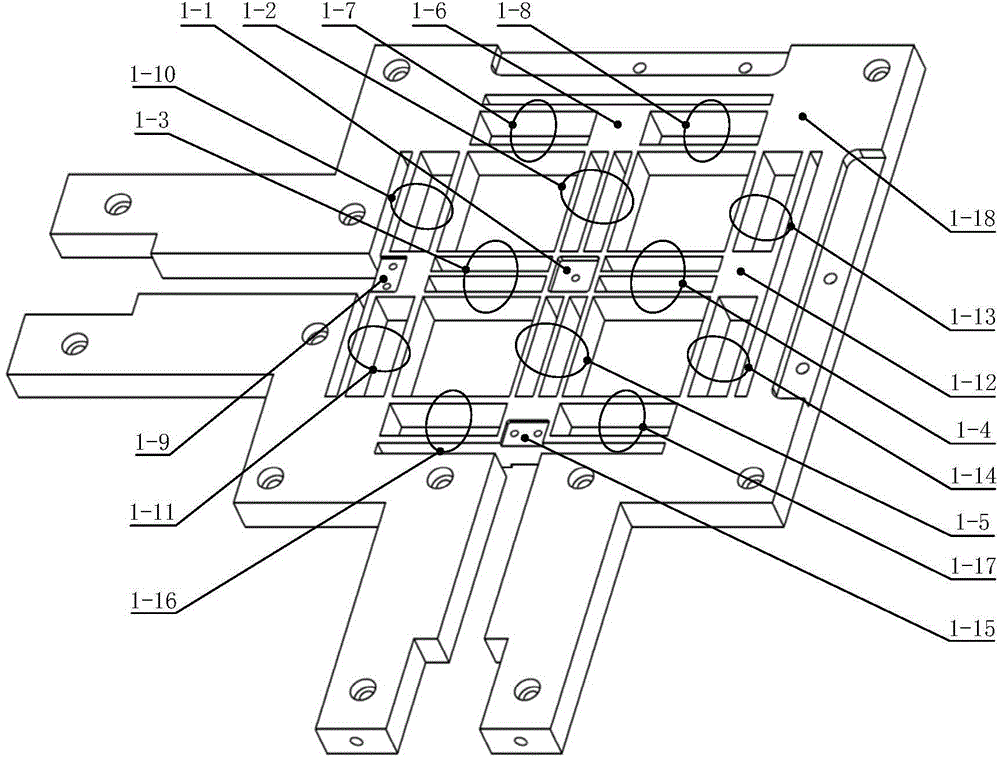
[0050] 1-1 terminal rigid output platform;
[0051] 1-2 flexible hinge branches;
[0052] 1-3 flexible hinge branches;
[0053] 1-4 flexible hinge branches;
[0054] 1-5 flexib...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More