

Camera intrinsic and extrinsic parameter automatic calibration method based on directional calibration target
A technology of automatic calibration and internal and external parameters, applied in image data processing, image analysis, instruments, etc., can solve inflexibility; around 1999, Microsoft Research Institute, unable to judge the rotation direction of a plane target without directional information, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
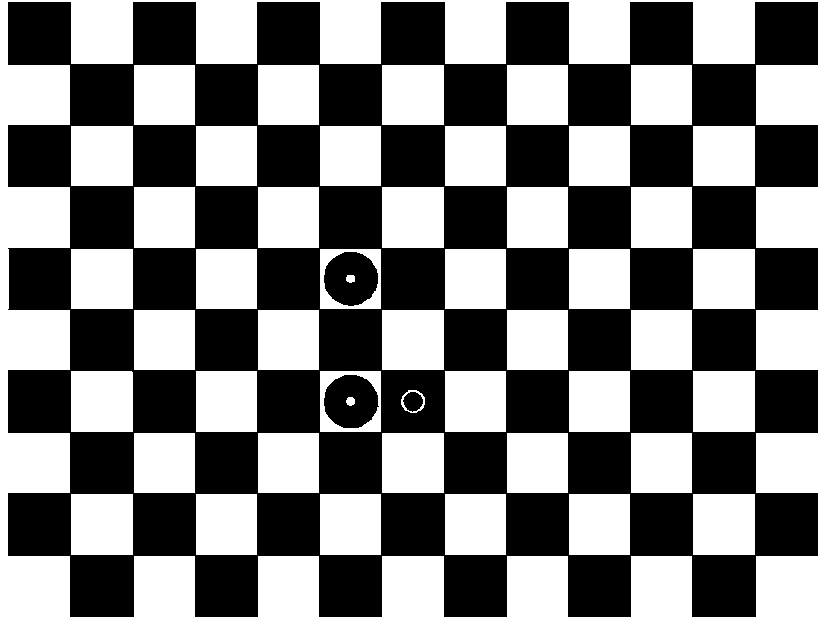
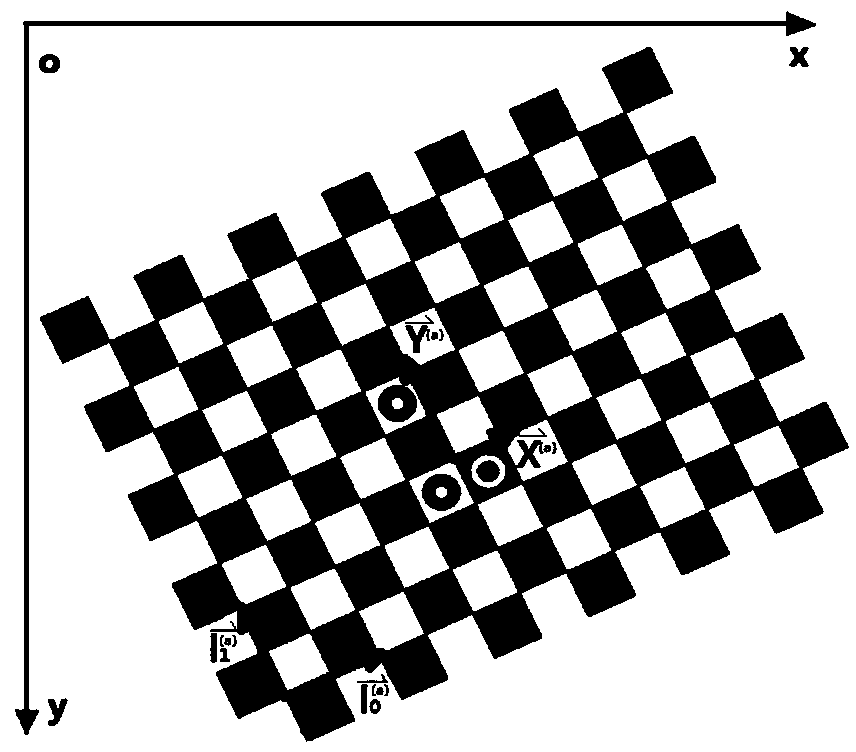
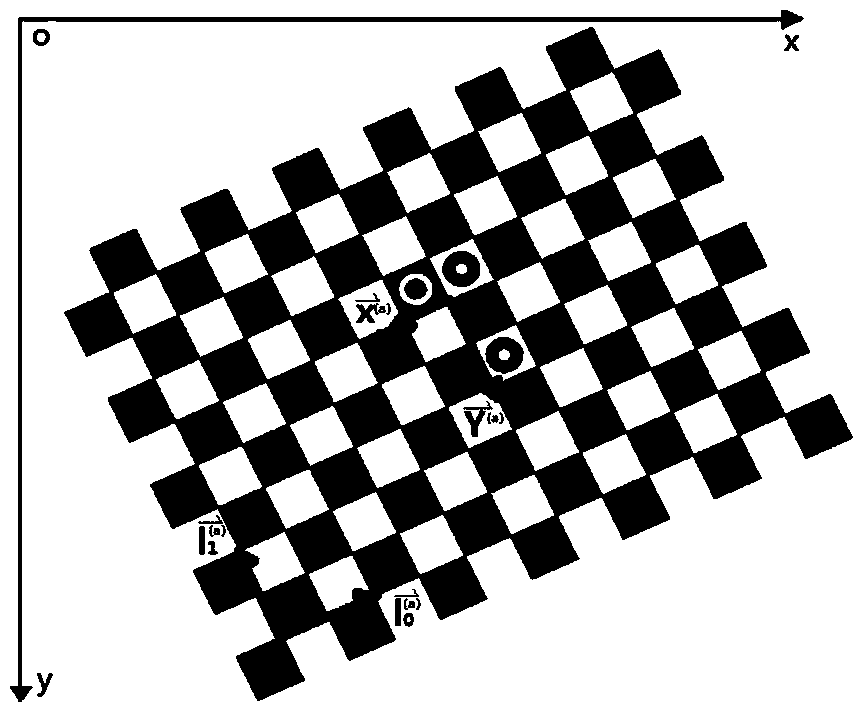
[0054] In this example, if figure 1 As shown, the directional calibration target is composed of a checkerboard consisting of black squares and white squares alternately and a directional sign pattern set near the center of the checkerboard; any two black squares connected diagonally or the intersection of any two diagonally connected white squares as the characteristic corners of the directional calibration target; the checkerboard contains M rows×N columns of characteristic corners; M and N are both positive integers; black squares and The side lengths of the white squares are all W; W>0; in this embodiment, if figure 1 The shown directional calibration target contains 9 rows × 12 columns of characteristic corner points; the side lengths of the black square and white square of the directional calibration target are both 18 mm;
[0055] The directional sign pattern is composed of 3 small sign pictures; the 3 small sign pictures are respectively the first sign picture, the sec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More