

Bi-plane parallel mechanism capable of achieving plane two-dimensional positioning and spatial two-dimensional orientation
A two-plane, two-plane technology, applied in the field of parallel robots, can solve the problems of medical robots with complex configuration, low surgical safety, and low operating precision, and achieve flexible and convenient control, good rigidity performance, and high positioning accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
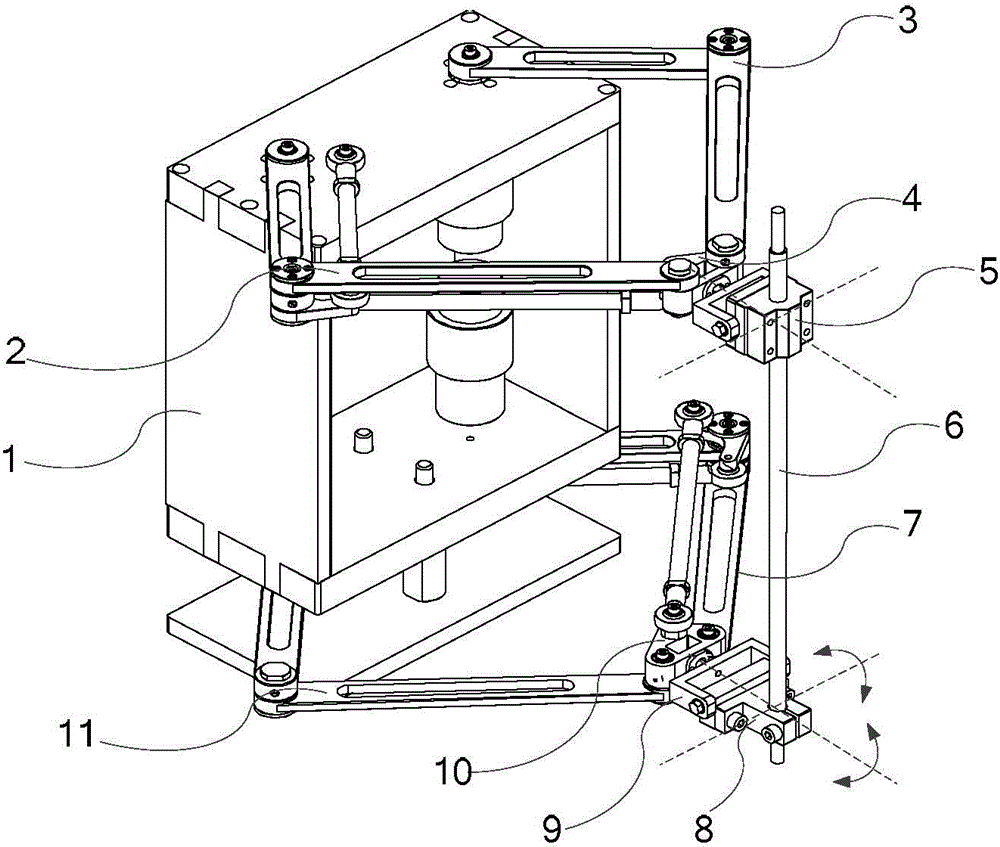
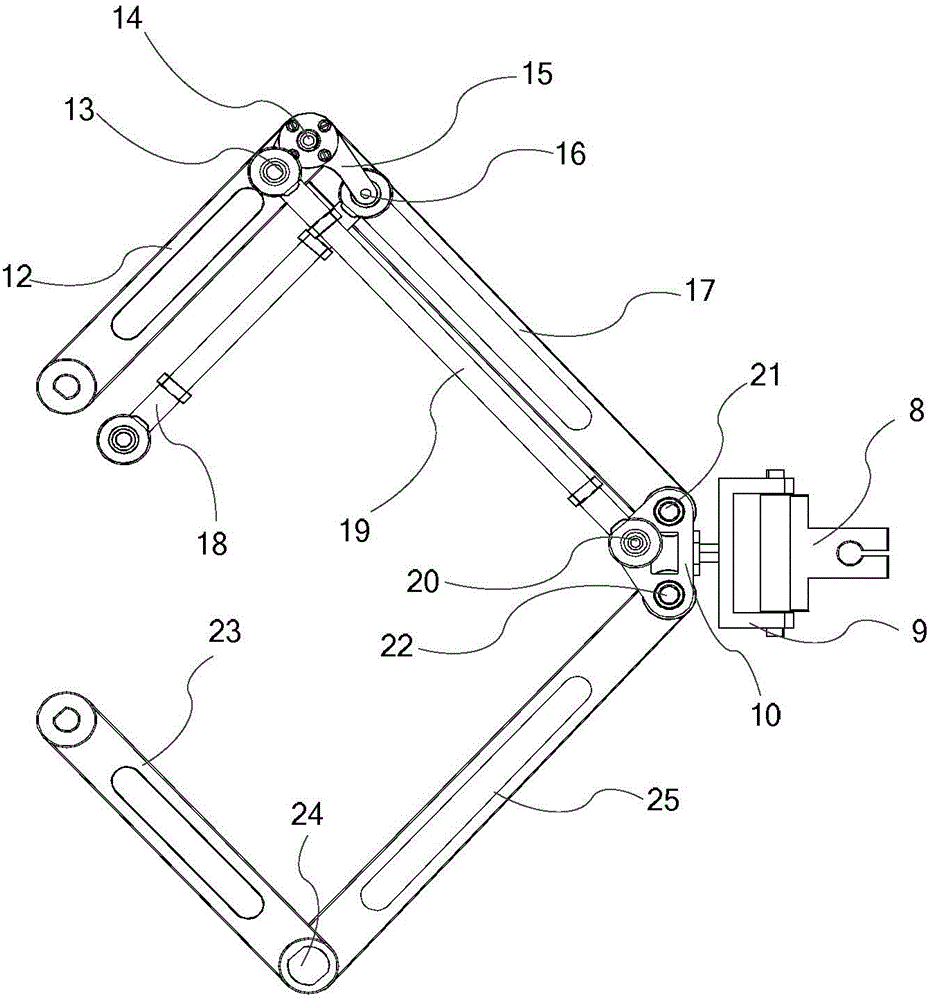
[0058] Specific implementation mode 1, refer to Figure 1 to Figure 8 Describe this embodiment mode, a two-plane parallel mechanism that can realize plane two-dimensional positioning and space two-dimensional orientation described in this embodiment mode, it includes an upper plane driving mechanism, a lower plane driving mechanism, a frame 1, a driving device 26, Upper plane connector, lower plane connector and end device 6;
[0059] Frame 1 comprises upper frame 1-1, left frame 1-2, lower frame 1-3 and right frame 1-4; Upper frame 1-1, left frame 1-2, lower frame 1-3 and right frame 1- 4 connected end to end to form a hollow cuboid frame or square frame;
[0060] The upper plane driving mechanism is coaxially connected with the terminal instrument 6 through the upper plane connecting piece; the lower plane driving mechanism is coaxially connected with the terminal instrument 6 through the lower plane connecting piece; the upper plane driving mechanism and the lower plane dr...
specific Embodiment approach 2
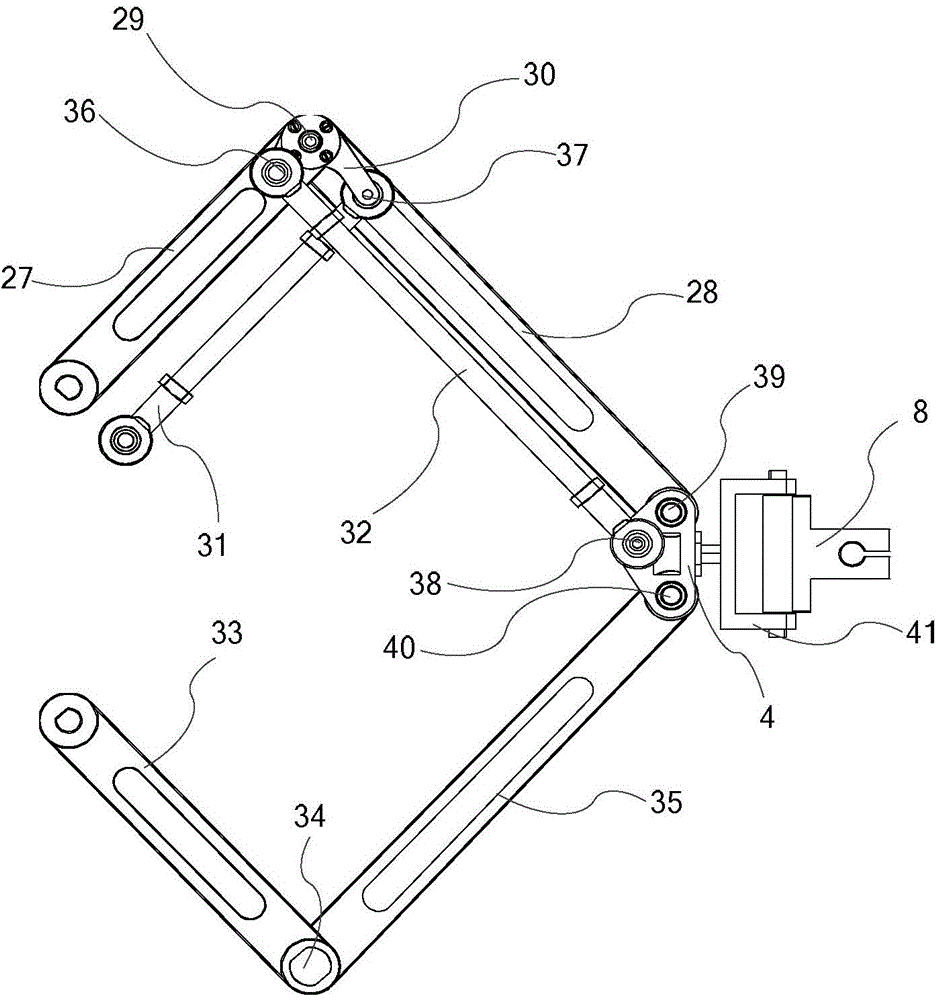
[0068] Specific implementation mode two, refer to Figure 8 Describe this embodiment. This specific embodiment is a further description of a dual-plane parallel mechanism that can realize two-dimensional positioning on a plane and two-dimensional orientation in space as described in Embodiment 1. In this embodiment, the driving device 26 is four Two are used to drive the upper plane drive mechanism, and two are used to drive the lower plane drive mechanism.
specific Embodiment approach 3
[0069] Specific implementation mode three, refer to Figure 8 Describe this embodiment. This specific embodiment is a further description of a dual-plane parallel mechanism that can realize plane two-dimensional positioning and spatial two-dimensional orientation described in the second specific embodiment. In this embodiment, four driving devices 26 Both are located inside the frame 1, and the two driving devices 26 for driving the upper plane driving mechanism are fixed on the upper frame 1-1; the two driving devices 26 for driving the lower plane driving mechanism are fixed on the lower frame 1-1. 3; the driving device 26 is a motor.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More