Track swing arm type obstacle-crossing robot
A swing-arm, robot technology, used in tracked vehicles, motor vehicles, transportation and packaging, etc., can solve problems such as inability to apply in obstacles, complex robot control systems, and insufficient transmission torque. Good application prospect, simple control effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be further described below in conjunction with the accompanying drawings.
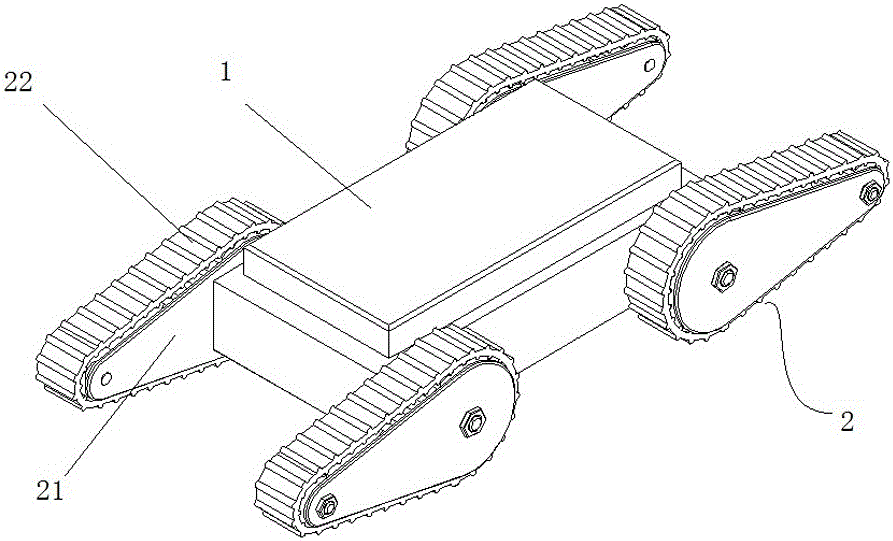
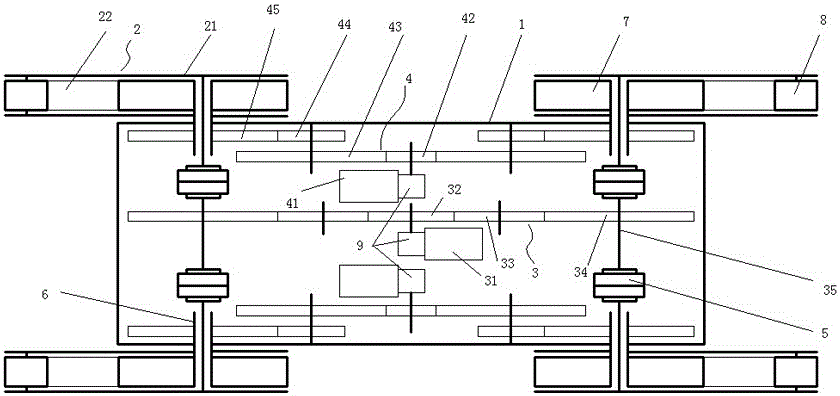
[0022] Such as figure 1 and figure 2 As shown, a crawler swing arm type obstacle-surpassing robot includes a car body 1, the car body 1 is the robot car body, the car body 1 is used to store the power supply and the control system of the robot, and can also be used as a mechanical arm or other equipment The two sides of the car body 1 are respectively provided with a group of motion systems, and the motion systems on both sides of the car body 1 cooperate with each other to realize the movement of the robot. Each group of motion systems includes two crawler swing arm devices 2 , respectively arranged at both ends of one side of the vehicle body 1, the crawler swing arm device 2 includes a swing arm 21 and a crawler belt 22 arranged on the swing arm 21, the movement of the swing arm 21 and the crawler belt 22 is separated, the vehicle The body 1 is provided with a fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com