

Method for adjusting speed of high-power biaxial contra-rotating brushless direct-current motor for underwater vehicles
An underwater vehicle, brushed DC motor technology, applied in the direction of single motor speed/torque control, electronic commutator, etc., can solve the problems of increasing the difficulty of controlling motor operation and speed regulation, complex system operation, and high rated speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0069] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
[0070] This embodiment is a double-rotation brushless DC motor speed control system applied to underwater vehicles.
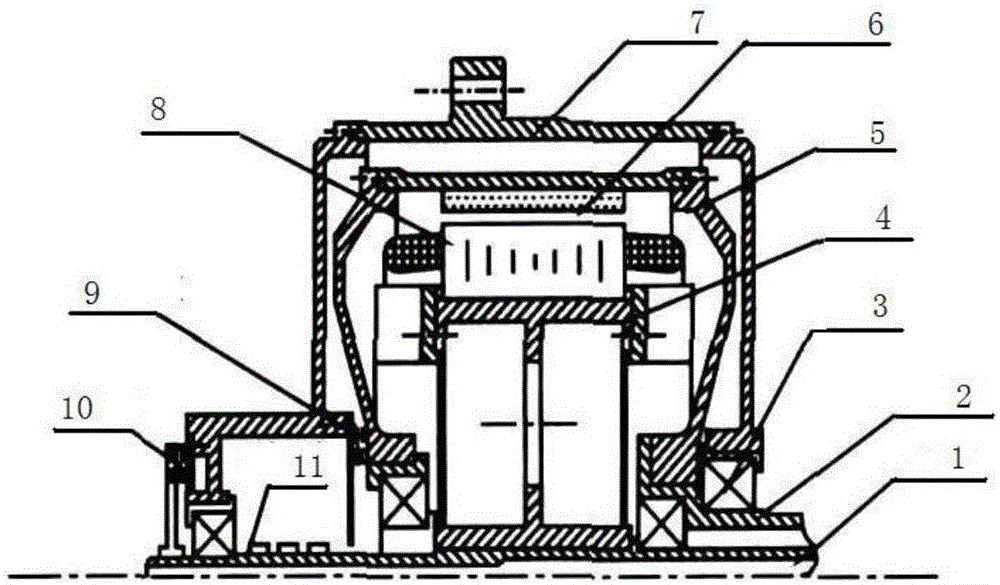
[0071] Refer to attached figure 2 , The double-rotation brushless DC motor is composed of an inner rotor, an outer rotor, an inner rotor Hall disc, an outer rotor Hall disc, an inner shaft, an outer shaft, and a slip ring.
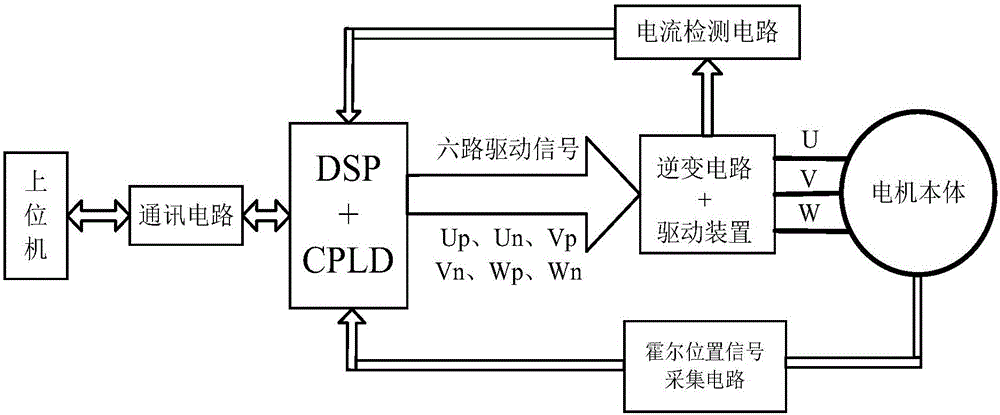
[0072] Refer to attached image 3 , as can be seen from the figure, the dual-axis counter-rotating brushless DC motor speed control system consists of a host computer, a communication circuit, a main controller DSP+CPLD, an inverter circuit, a driving device, a current detection circuit, and a Hall position signal acquisition circuit. and the motor body.
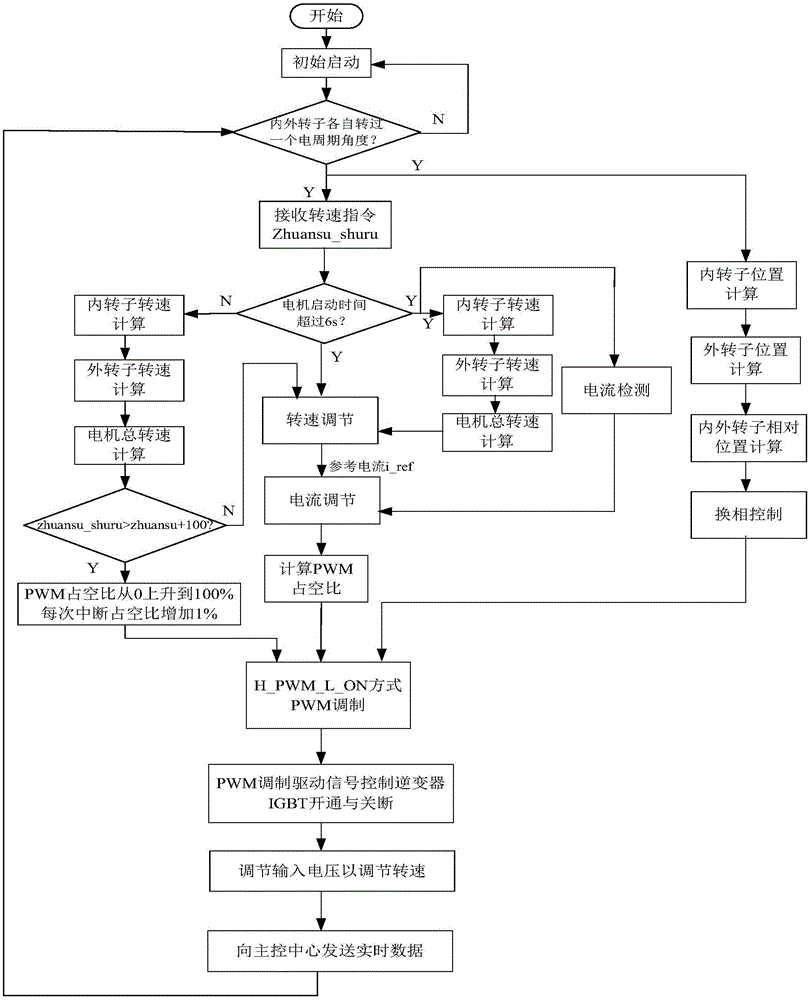
[0073] Refer to attached figure 1 , the underwater vehicle in the present embodiment uses the high-power two-axis counter-rotating brushless DC motor speed regulation m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More