

Novel connecting-rod type mechanical arm
A link-type, manipulator technology, applied in the direction of manipulators, program-controlled manipulators, chucks, etc., can solve the problems of high debugging complexity, increased production costs, and reduced production efficiency, so as to reduce production costs, increase working strokes, and improve The effect of production efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] Combine below Attached picture Preferred embodiments of the present invention will be described in detail.
[0033] In order to achieve the purpose of the present invention, in the present invention a new type In the embodiment of the linkage manipulator,
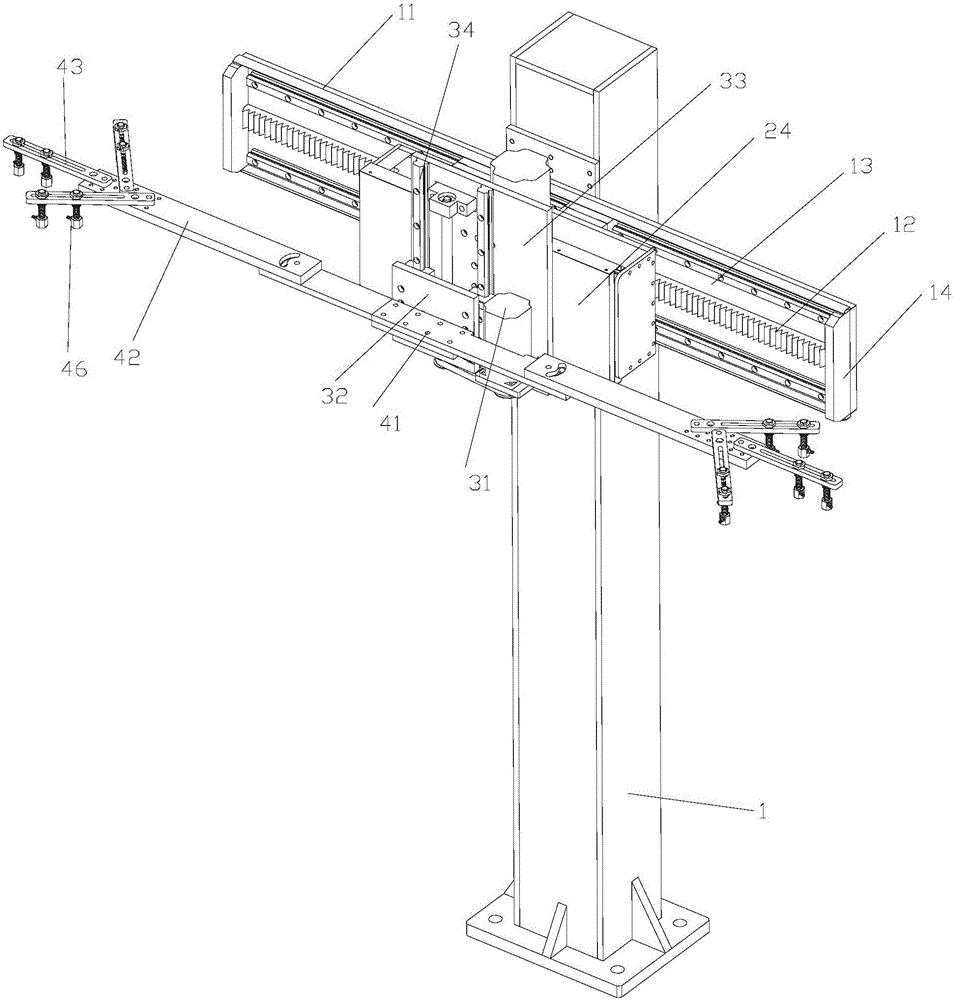
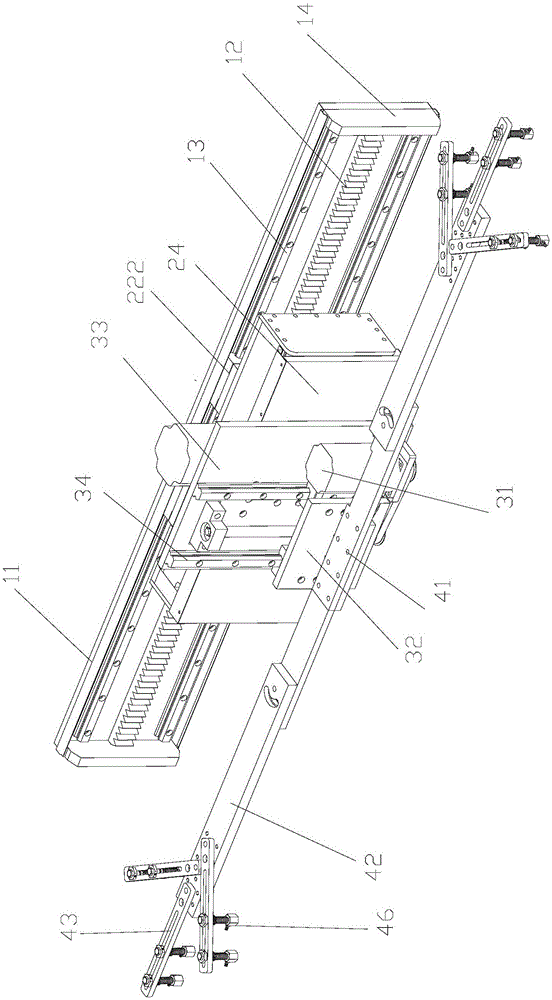
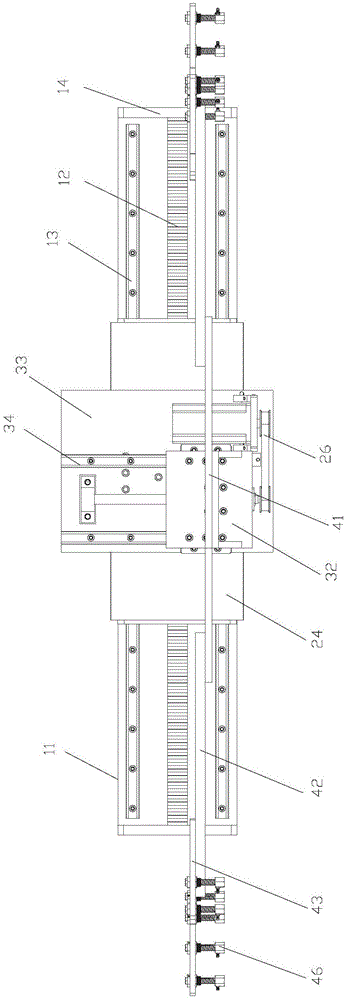
[0034] Such as Figure 1-6 shown, a new type The link-type manipulator includes: a frame 1, a horizontal moving component 2, a lifting component 3, and a retrieving component 4.
[0035] The horizontal moving assembly 2 is arranged on the frame 1, and includes: a first horizontal motor 21, a first horizontal carrier plate 22 connected to the first horizontal motor 21, a second horizontal motor 23, and a The second horizontal carrier plate 24, the first horizontal carrier plate 22 is provided with a horizontal double-moving guide rail 221, the second horizontal carrier plate 24 is arranged on the horizontal floating guide rail 221, and the second horizontal carrier plate 24 slides with the first horizontal carr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More