

Hose cleaning robot
A technology for cleaning robots and hoses, applied in the direction of cleaning hollow objects, cleaning methods and utensils, chemical instruments and methods, etc., can solve problems such as difficult control, large number of drives, limited motion modes, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
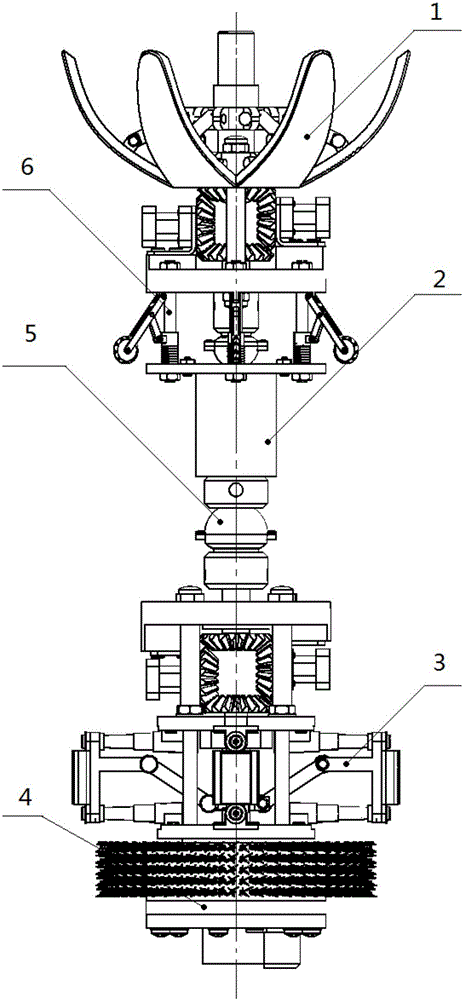
[0063] The invention realizes the functions of crawling and cleaning in the hose in any state, and mainly includes three parts: the upper fixing mechanism (1), the middle advancing mechanism (2) and the lower fixing mechanism (3), in addition to guide wheels Mechanism (6), universal joint mechanism (5), cleaning brush mechanism (4) functional parts.
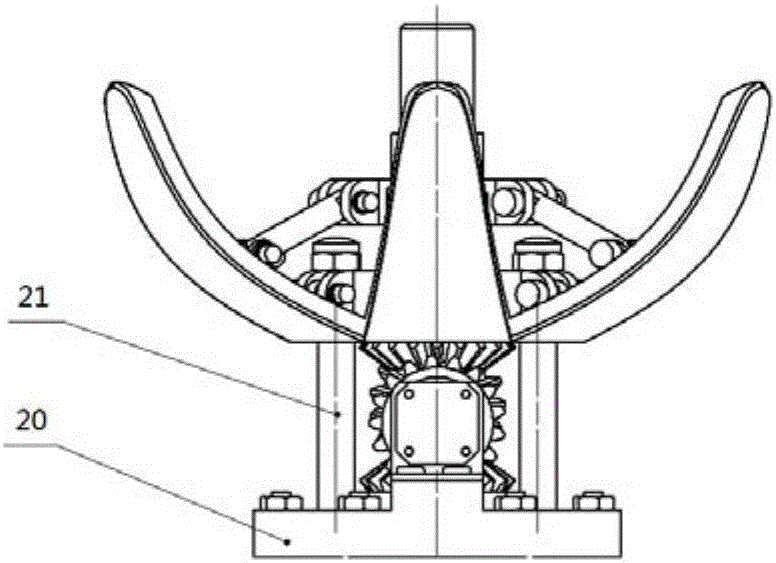
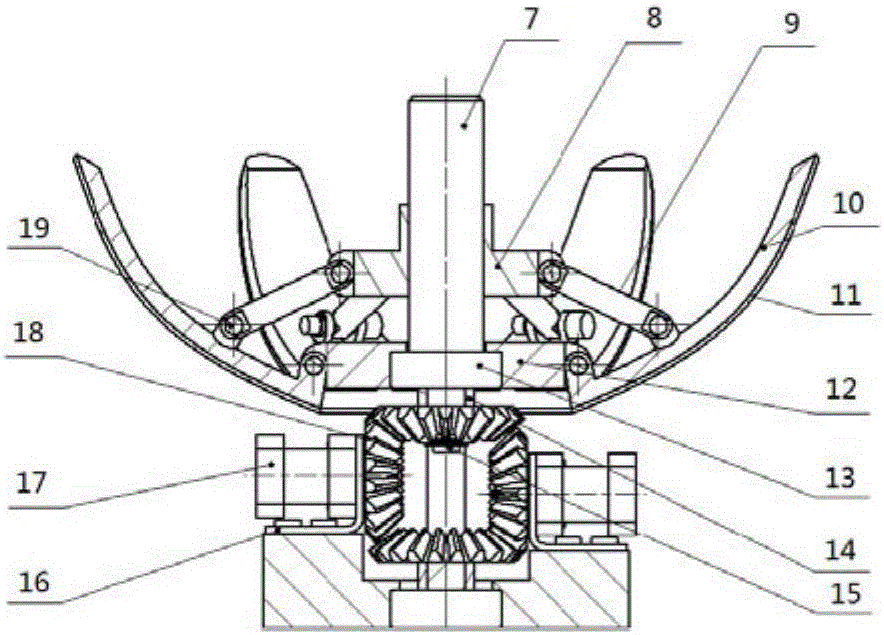
[0064] As shown in Figure 2, the upper fixing mechanism (1) includes an upper screw (7), an upper slider (8), an upper connecting rod (9), an upper support plate (10), an upper rubber pad (11), an upper bearing Seat (12), upper bearing (13), upper bearing cover (14), upper screw (15), upper motor seat (16), upper motor (17), upper bevel gear (18), upper fixed plate (20 ), the upper support column (21). The upper fixed plate (20) is connected with the upper bearing seat (12) through the upper support column (21), the upper motor (17) is fixed on the upper fixed plate (20) through the upper motor base (16), and the upper motor (17...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More