

Non-affine uncertain system self-adaptive control method with range restraint
An adaptive control, non-affine technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as loss of nonlinear characteristics, considerable challenges, and reduced application range of controller strategies. Achieve the effect of simple controller structure and good robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
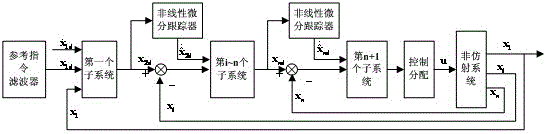
[0017] Such as Figure 1~2 As shown, the present invention is an adaptive control method for non-affine uncertain systems with interval constraints. According to the median value theorem, nonlinear mapping and inversion techniques, an adaptive controller is designed for non-affine uncertain systems. Its characteristics are Include the following steps:
[0018] (1) Non-affine system assumptions and affine transformation methods:
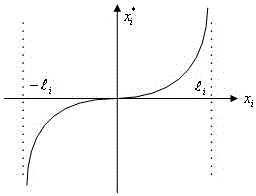
[0019] A: The assumption of a non-affine uncertain system is that the state, input and uncertain parameters of the system are bounded by intervals.
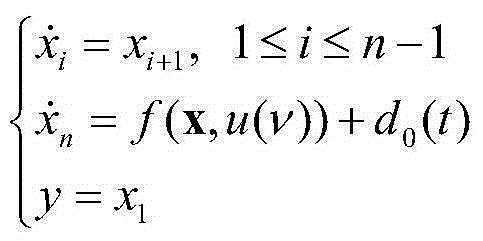
[0020] x · i = x i + 1 , 1 ≤ ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More