

Eel-like underwater multi-freedom-degree robot
A technology of robot and degree of freedom, applied in underwater operation equipment, manipulator, program control manipulator, etc., can solve the problems of high cost and complex structure, and achieve the effect of low fluid disturbance, high concealment and small flow field disturbance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be described in more detail below in conjunction with the accompanying drawings.
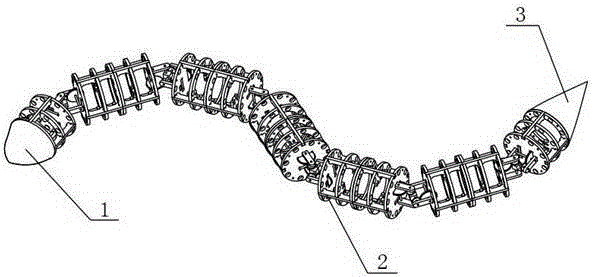
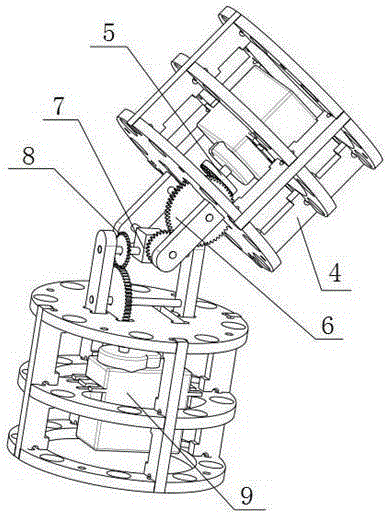
[0015] figure 1 It is a schematic diagram of the overall structure of the present invention, the robot head 1 is connected with the cross structure 2, several cross structures 2 are connected together, and the cross structure 2 is connected with the tail 3 to form the body of the robot. figure 2 It is a schematic diagram of the cross structure 2, the steering gear 9 is mounted on the frame 4, the crown gear 5 is mounted on the steering gear 9, the crown gear 5 meshes with the pinion 8, and the pinion 8 is mounted on the cross shaft 7 and meshes with the large gear 6, The steering gear 9 realizes the arbitrary rotation of the three-dimensional space of the cross structure 2 through gear transmission.
[0016] The specific working process of the present invention is as follows: by controlling the rotation of the steering gear 9, the rotation of the driving cross...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More