

Robot working simulation system under nuclear radiation environment and method thereof
The technology of a simulation system and simulation method, applied in the field of robot operation simulation system, can solve the problems of lack of rapidity, reliability, effectiveness, controllability and danger of robots, and achieve effective emergency treatment, fast establishment and fast guarantee sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0036] Embodiment 1: the object of the present invention is to overcome the problem that the manpower work is too dangerous under the nuclear radiation environment, and the robot work lacks rapidity, reliability, effectiveness and controllability, and provides a method that can improve A robot operation simulation system in a nuclear radiation environment for the rapidity, reliability, effectiveness and controllability of the working robot, including,
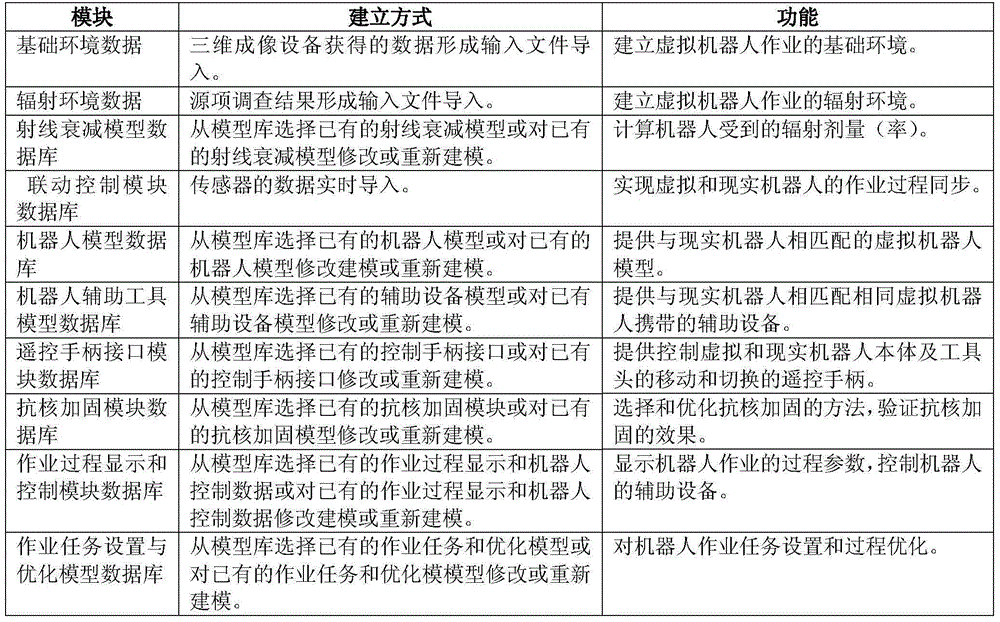
[0037] The modeling unit 1 is used to collect the data of the robot and its working environment, and establish a model of the robot and its working environment according to the data;
[0038] The virtual simulation unit 2 is used to perform dynamic operation simulation of the robot in combination with the operation tasks of the robot based on the model of the robot and its operating environment established by the modeling unit 1;
[0039] The display unit 3 is used to display the dynamic operation process of the robot simulated...
Embodiment 2
[0053] Embodiment 2: This embodiment provides a method for simulating robot operations in a nuclear radiation environment, including
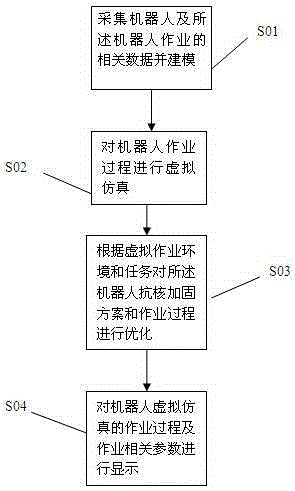
[0054] S01: Collect data related to the robot and its operating environment, and model the robot and its operating environment according to the data;
[0055] S02: Carry out virtual simulation of the robot task in the established model according to the task of the robot;
[0056] S03: Optimizing the anti-nuclear hardening scheme of the robot and optimizing the operation process of the robot according to the working environment and tasks of the working robot;
[0057] S04: Display the scene and related parameters of the virtual simulation of the robot operation process.
[0058] It should be pointed out that there is no fixed sequence of execution among steps S02, S03, and S04. They can be executed sequentially or synchronously. Virtual simulation, optimization of the anti-nuclear reinforcement scheme of the robot (the anti-nuclear reinforceme...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More