

Omnidirectional moving platform navigation method
A technology of omnidirectional movement and navigation method, which is applied in the field of indoor mobile robot navigation, and can solve problems such as application limitations, low positioning accuracy, and lack of flexibility in paths
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] In order to make the purpose, contents and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
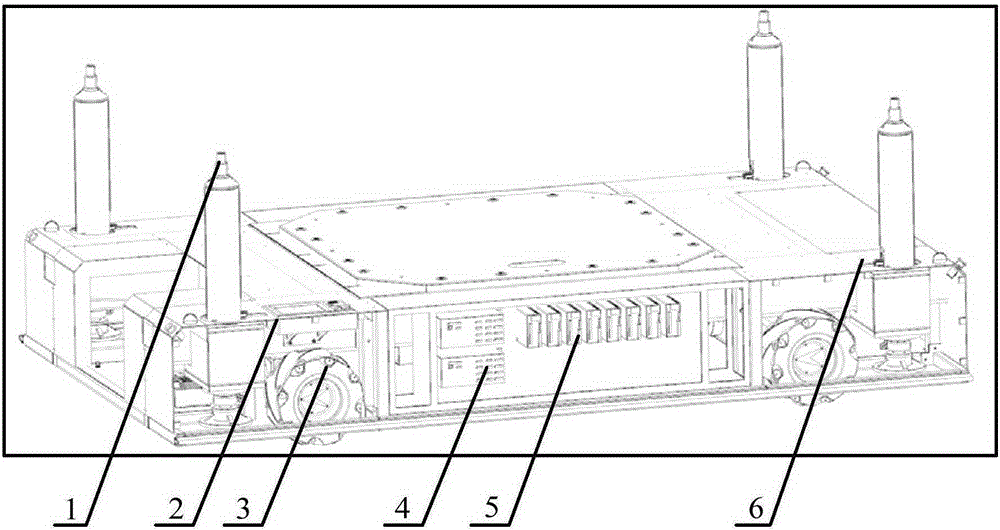
[0033] Such as figure 1 As shown, a kind of omnidirectional mobile platform navigation method of the present invention adopts a kind of omnidirectional mobile platform navigation system, such as figure 1 As shown, the system includes 4 mecanum wheel sets 3 (including servo drive motors), 4 iGPS receivers 1, industrial computer 2, motion controller 4 (uMac multi-axis controller), motor driver 5, Omnidirectional mobile platform frame 6.
[0034] 4 mecanum wheel drive wheel sets are used to realize the forward, backward, lateral movement, rotation and other compound movements of the platform; the industrial computer 2 includes a navigation processing module.
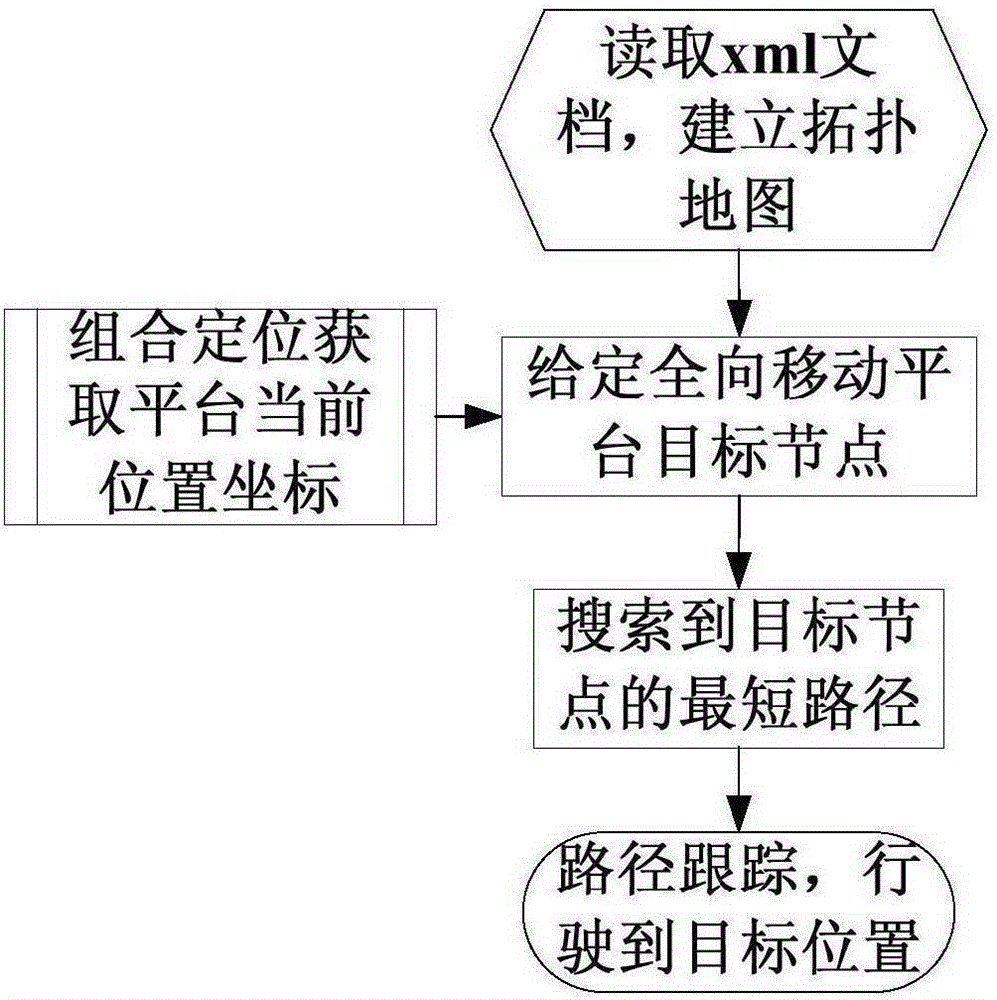
[0035] The navigation processing module reads the xml document, and establishes a topology map for ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More