

Novel disturbance-rejection following controller for ball screw feeding system
A ball screw and feed system technology, applied in the control of electromechanical brakes, control systems, digital control, etc., can solve the problems of difficult debugging of control parameters, complex algorithms, and dependence on accurate models of the system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
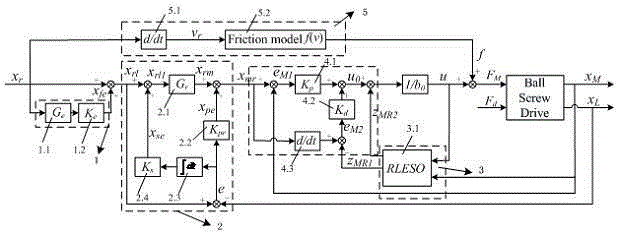
[0040] figure 1 Firstly, the general composition of the anti-disturbance follower controller of the feed system is given, which adopts a dual position feedback control architecture different from the position loop and speed loop control mode of the traditional feed system: the inner loop uses the equivalent position signal x of the motor angular position M As a feedback signal, while the outer loop passes the load position signal x L The feedback realizes the closed-loop control of the whole system. This controller has an equivalent error model feed-forward controller 1, a load position controller 2, a motor position state observer 3, a motor position controller 4, and a friction compensation controller 5, where:
[0041] The motor position state observer 3 uses the input motor control variable u and the equivalent linear position x of the motor through the linear extension state observer LESO3.1 M , to obtain the estimated value Z of the equivalent linear position of the mo...
Embodiment 2
[0062] For the evaluation of the total disturbance of the motor position loop, in addition to the evaluation of the linear extended state observer described in Embodiment 1, a reduced-order linear extended state observer can also be used for evaluation, such as figure 2 shown. The motor position state observer 3 uses the input motor control variable u and the motor equivalent linear position x through the reduced-order linear expansion state observer RLESO3.1 M Evaluate to obtain the estimated value Z of the motor equivalent speed MR1 and the total disturbance Z of the motor position feedback loop MR2 ; The motor position controller 2 uses the differential of the motor position command signal and the reduced-order linear extended state observer RLESO3.1 to obtain the evaluation value Z of the motor equivalent speed MR1 Subtract to get the speed error signal e M2 ;Use the motor position command signal x mr Subtracted measured motor equivalent position x M Get the motor po...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More