

Relative orbit attitude finite time control method for non-cooperative target spacecraft
A non-cooperative target and relative orbit technology, applied in attitude control, three-dimensional position/course control, non-electric variable control, etc., can solve problems such as complex dynamic model and complex controller form, and achieve easy engineering implementation and simple form , the effect of small amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0093] DETAILED DESCRIPTION OF THE PREFERRED EMBODIMENT 1. A non-cooperative target spacecraft relative orbital attitude finite time control method described in this specific embodiment includes the following steps:
[0094] Step 1. Project the relative orbital dynamics model represented by the inertial system to the line of sight system, and use the line of sight system to describe the relative orbital dynamics model of the spacecraft;
[0095] Step 2, establishing attitude dynamics model and attitude kinematics model;
[0096] Step 3, performing state space representation on the relative orbital dynamics model, attitude dynamics model and attitude kinematics model to obtain the relative orbital attitude dynamics model;
[0097] Step 4: Obtain a finite-time continuous controller based on the relative orbital attitude dynamics model and finite-time control theory.
[0098]This embodiment adopts the finite-time control theory and adopts the continuous control method to obtain ...
specific Embodiment approach 2
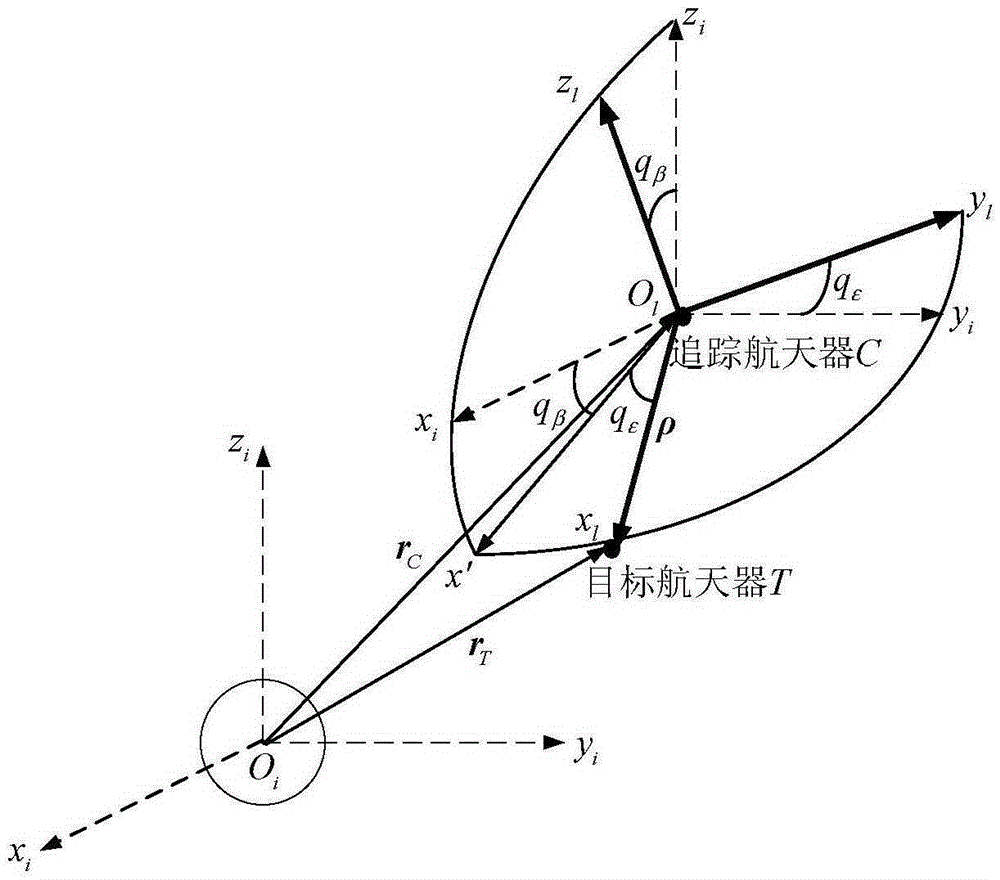
[0099] Specific embodiment two, combine figure 1 Describe this specific embodiment. The difference between this specific embodiment and the finite-time control method for the relative orbital attitude of a non-cooperative target spacecraft described in the first specific embodiment is that the relative orbital dynamics expressed by the inertial system described in the first step The specific process of using the line-of-sight system to describe the relative orbital dynamics model of the spacecraft is as follows:
[0100] will use the inertial frame O i x i the y i z i The relative orbital dynamics model represented by is projected to the line of sight O l x l the y l z l :
[0101] ( d 2 ρ ...
specific Embodiment approach 3
[0106] Specific Embodiment Three. The difference between this specific embodiment and the finite-time control method for the relative orbital attitude of a non-cooperative target spacecraft described in the second specific embodiment is that the establishment of the attitude dynamics model and the attitude kinematics model described in step two The specific process is:
[0107] Use the subscript b to represent the body coordinate system, t to represent the target aircraft, and c to represent the tracking aircraft, then the attitude dynamics equation of the tracking spacecraft, that is, the attitude dynamics model is:
[0108] J c ω · b c + ω b c × J c ω b c = ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More