

Depth control device of autonomous underwater vehicle
An underwater submersible and depth control technology, which is applied to underwater ships, underwater operating equipment, transportation and packaging, etc., can solve the problems of high energy consumption, poor response speed and robustness, and reliability and accuracy issues in fixed-depth navigation. Improvement and other issues to achieve the effect of overcoming shock and poor anti-interference ability, ensuring stability and robustness, and improving underwater running time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
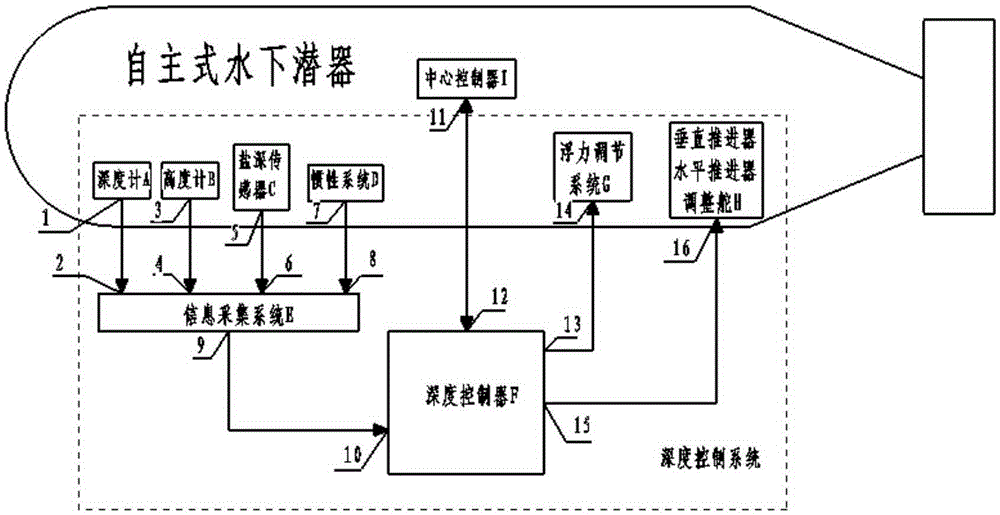
[0037] Implementation 1, combined with the attached figure 1 , the entity of the present invention is made up of depth gauge A, altimeter B, salt depth sensor C, inertial system D, information acquisition system E, depth controller F, buoyancy adjustment system system G, propulsion system H and central controller I. The output interface 1 of the depth gauge A is connected to the input interface 2 of the information collection system E, the output interface 3 of the altimeter B is connected to the input interface 4 of the information collection system E, and the output interface 5 of the salt depth sensor C is connected to the input interface of the information collection system E. The input interface 6, the output interface 7 of the inertial system D is connected to the input interface 8 of the information collection system E, the output interface 9 of the information collection system E is connected to the input interface 10 of the depth controller F, and the interface 12 of t...
Embodiment 2
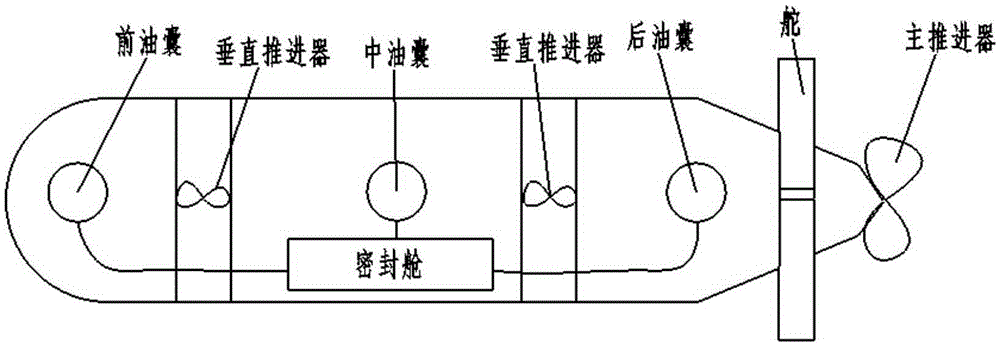
[0046] Implementation 2, combined with the attached figure 2 , the depth control device consists of the submersible's horizontal main propeller, vertical propeller, horizontal wing, vertical rudder, and buoyancy adjustment system. The shape of the underwater autonomous submersible is mainly streamlined, and the movement resistance in the forward direction is very small, which can ensure that the horizontal propeller advances with maximum efficiency and the resistance in the forward direction is small, while in other directions such as floating and diving movements The resistance is relatively large, so the combination of horizontal thrusters and rudders can ensure that the submersible rises and dives at the fastest speed. Because the movement resistance of the submersible in the vertical direction is relatively large, the submersion speed of the submersible relying solely on the vertical thruster is relatively slow. The buoyancy adjustment system realizes the depth control o...
Embodiment 3
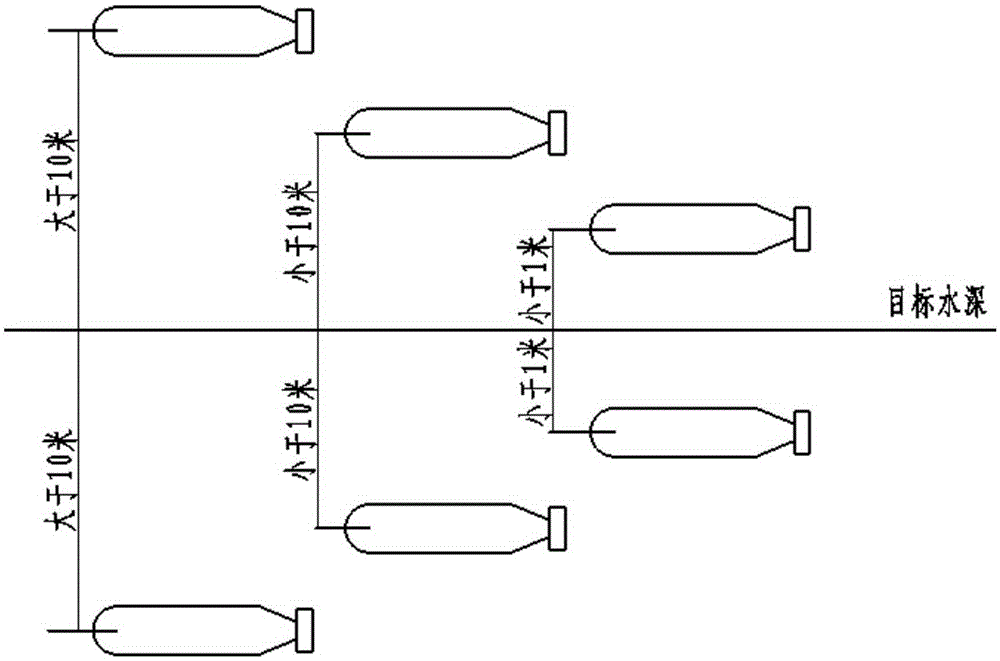
[0047] Implementation 3, combined with the attached image 3 , the multi-scale control method is based on the difference between the current depth of the submersible and the target depth, in order to ensure the rapidity and stability of control, the staged control devices and different control methods are adopted.
[0048] combined with Figure 4 , the PID controller is used for fast diving, and its control equation is:
[0049] u = K p ( e + 10 ) + K i ∫ 0 t e d t + K d d e d t - - - ( 1 )
[0050] In the formula...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More