

Laser photography measuring system and camera calibration method
A photogrammetry and laser rangefinder technology, which is applied to measurement devices, camera devices, instruments, etc., can solve the problems of increasing calibration error, decreasing measurement accuracy, and increasing calibration workload.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
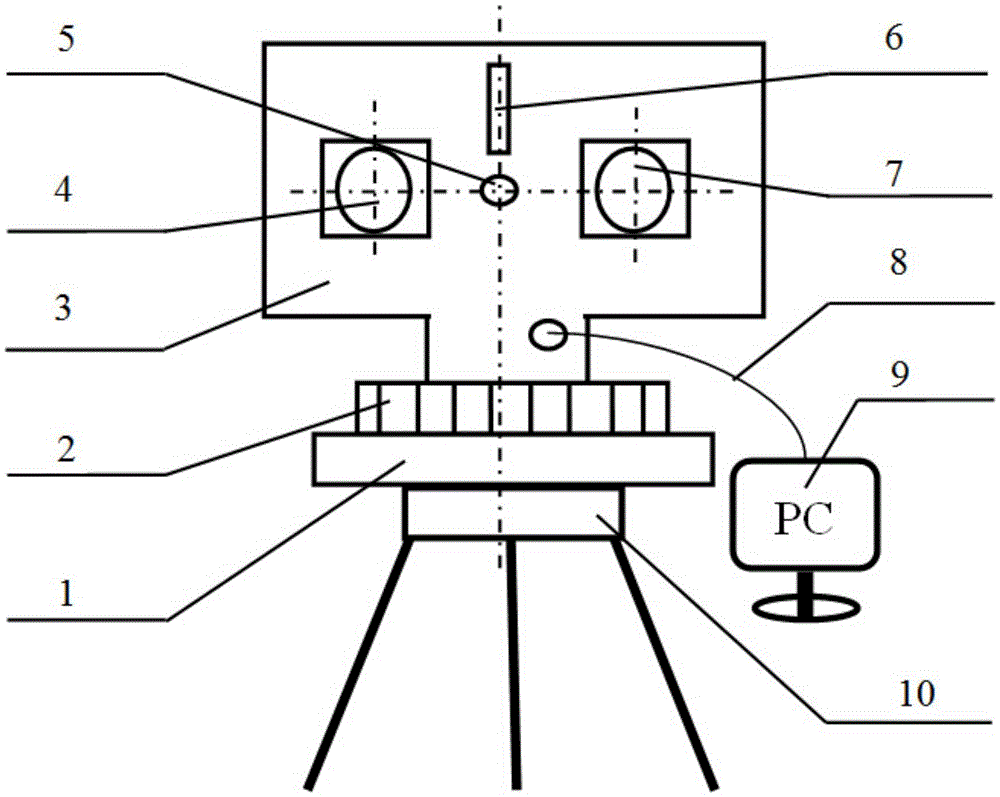
[0044] Such as figure 1 with figure 2 As shown, a laser photogrammetry system includes a measuring device and a calibration device, wherein the measuring device includes a base 1, a horizontal index plate 2, a bracket 3, two cameras 4 and 7, and a line laser transmitter 6. Laser range finder 5, data line 8, computer 9. Wherein, the camera 4 and the camera 7 are symmetrically installed on both sides of the laser range finder 5, and all three are installed on the bracket 3, and the computer 9 is connected with the control equipment in the bracket 3 through the data line 8. The measurement system also includes a tripod 10 , and the base 1 is connected and fixed to the tripod 10 through a threaded locking member on the tripod 10 .
[0045] Camera 4, camera 7, line laser emitter 6 and laser rangefinder 5 are all transmitted by computer 9 through data line 8 to transmit control commands, and the image data obtained are transmitted to computer 9 to facilitate data storage, calcula...
Embodiment 2
[0055] On the basis of Embodiment 1, this embodiment describes in detail the process of the camera calibration method using the laser photogrammetry system described in Embodiment 1.
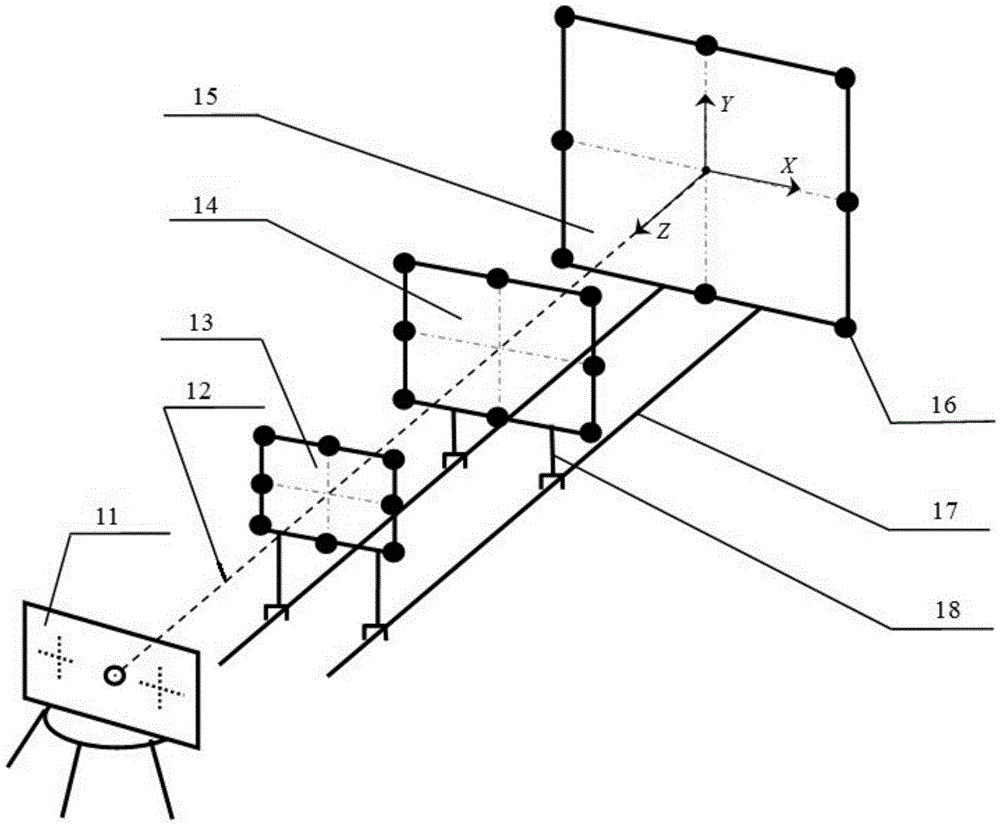
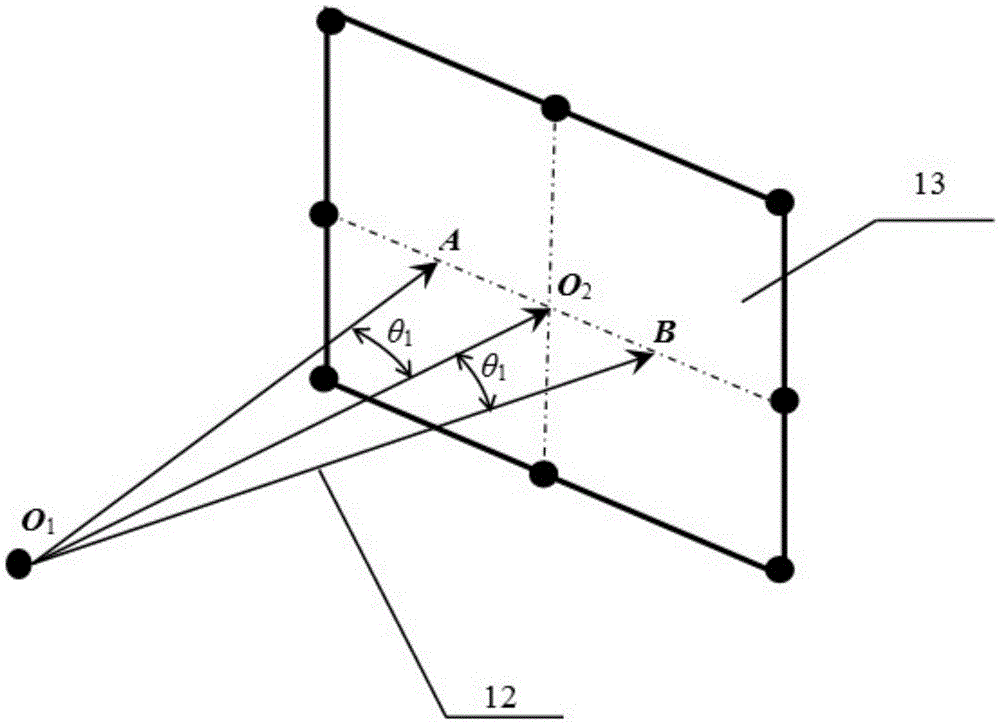
[0056] This embodiment provides a camera calibration method for a laser photogrammetry system. First, obtain the coordinates of each object-space identification point 16 in the object-space coordinate system, and then adjust the measuring device 11 so that the two cameras are facing the object-space model to take pictures. Image data of 24 object space identification points 16. The image coordinates of each object space identification point 16 are read out by the execution program of the camera calibration method on the computer 9, and the two cameras and the laser are calculated by the execution program using the correspondence between the object space coordinates of the object space identification point 16 and the image coordinates. The pose coordinates and internal orientation element paramet...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More