

Method and device of pavement identification on the basis of laser-point cloud
A laser point cloud and point cloud technology, applied in character and pattern recognition, image data processing, 3D modeling, etc., can solve the problems of low accuracy of road surface models and inability to filter out noise, so as to filter out noise and improve accuracy. sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
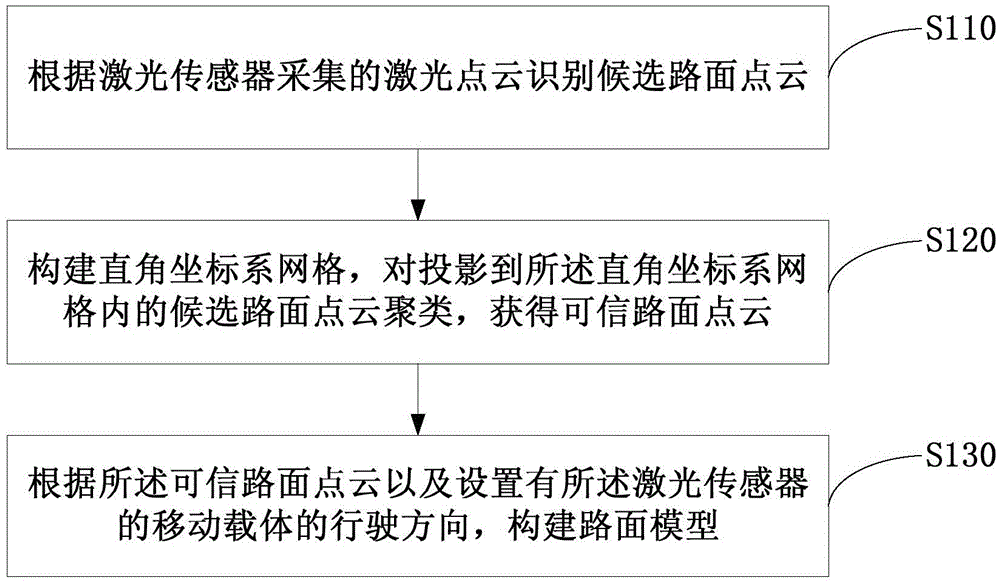
[0021] figure 1 It is a schematic flow chart of the laser point cloud-based road surface recognition method provided by Embodiment 1 of the present invention. This embodiment is applicable to the situation of constructing an accurate road surface model based on the laser point cloud collected by the laser sensor. The method can be executed by a laser point cloud-based road surface recognition device, which can be implemented by means of hardware and / or software, and can generally be integrated into a server for mapping roads.
[0022] see figure 1 , the laser point cloud-based road surface recognition method provided in this embodiment may specifically include the following:
[0023] S110. Identify candidate road surface point clouds according to the laser point clouds collected by the laser sensor.
[0024] The laser sensor is set on the mobile carrier and collects the laser point cloud of the current road surface at regular intervals. Wherein, the mobile carrier may be a...
Embodiment 2
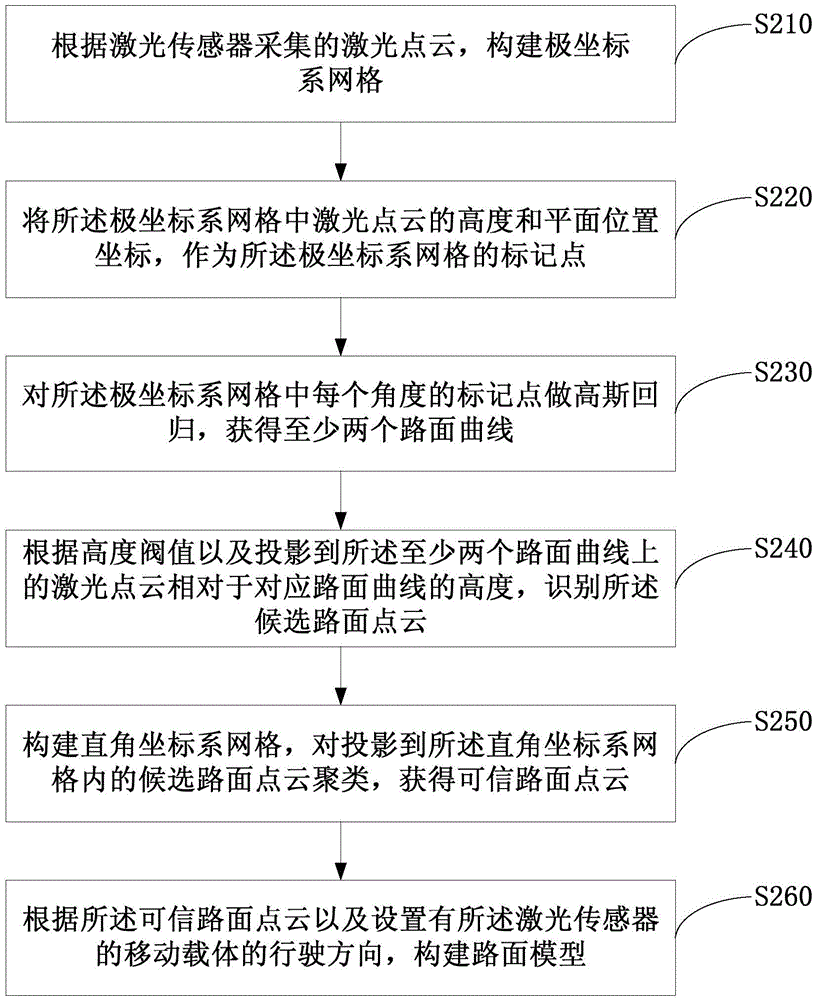
[0031] This embodiment provides a road surface recognition method based on a laser point cloud on the basis of the first embodiment above. figure 2 It is a schematic flow chart of the laser point cloud-based road surface recognition method provided by Embodiment 2 of the present invention. like figure 2 As shown, the laser point cloud-based road surface recognition method provided in this embodiment may specifically include the following:
[0032] S210. Construct a polar coordinate system grid according to the laser point cloud collected by the laser sensor.
[0033] For each frame of laser point cloud, with the current position of the mobile carrier provided with the laser sensor as the origin, a polar coordinate system grid is respectively constructed, so that the range of the polar coordinate system grid covers the frame of laser point cloud.
[0034] S220. Using the height and plane position coordinates of the laser point cloud in the polar coordinate system grid as ma...
Embodiment 3
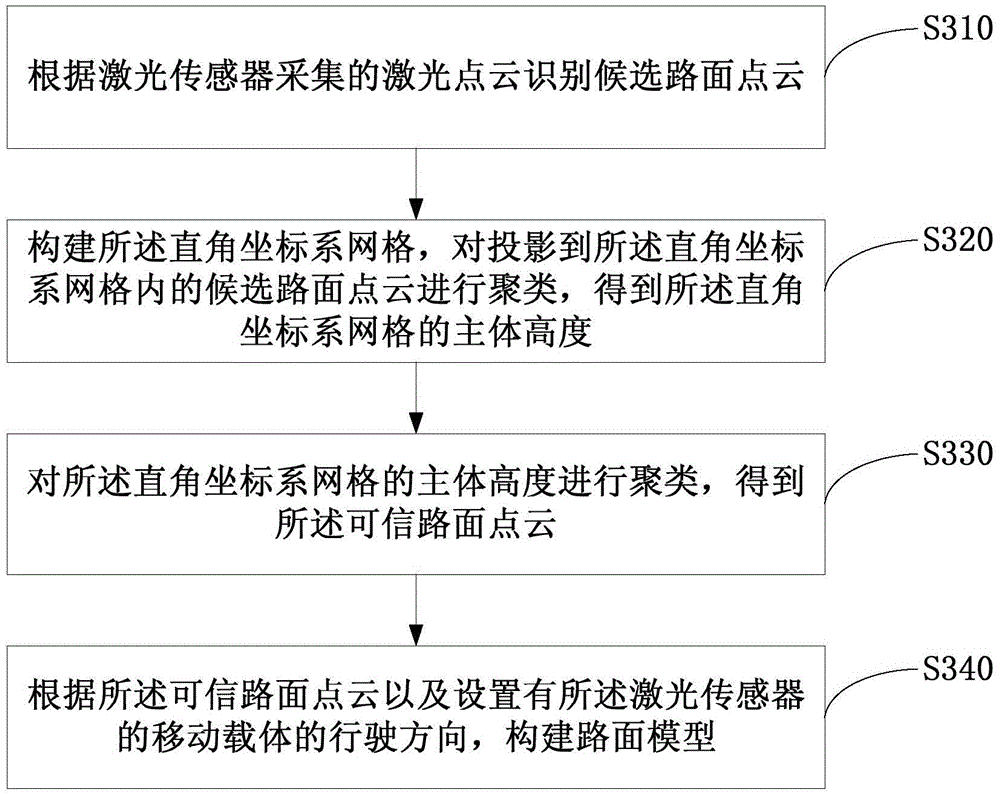
[0044] This embodiment provides a road surface recognition method based on laser point cloud on the basis of the above embodiments. image 3 It is a schematic flow chart of the laser point cloud-based road surface recognition method provided by Embodiment 3 of the present invention. Such as image 3 As shown, the laser point cloud-based road surface recognition method provided in this embodiment may specifically include the following:
[0045] S310. Identify candidate road surface point clouds according to the laser point clouds collected by the laser sensor.
[0046] S320. Construct the Cartesian coordinate system grid, cluster the candidate road surface point clouds projected into the Cartesian coordinate system grid, and obtain the body height of the Cartesian coordinate system grid.
[0047] Taking the current position of the mobile carrier provided with the laser sensor as the origin, and the current traveling direction of the mobile carrier as the vertical axis, a Cart...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More