

Eight-axis robot space curve welding system and method for recognizing welding line by means of lasers
A space curve and laser recognition technology, applied in welding equipment, auxiliary welding equipment, welding/cutting auxiliary equipment, etc., can solve the problems of low efficiency and low accuracy of automatic weld seam recognition methods, achieve high automation and improve efficiency , The effect of simple device structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
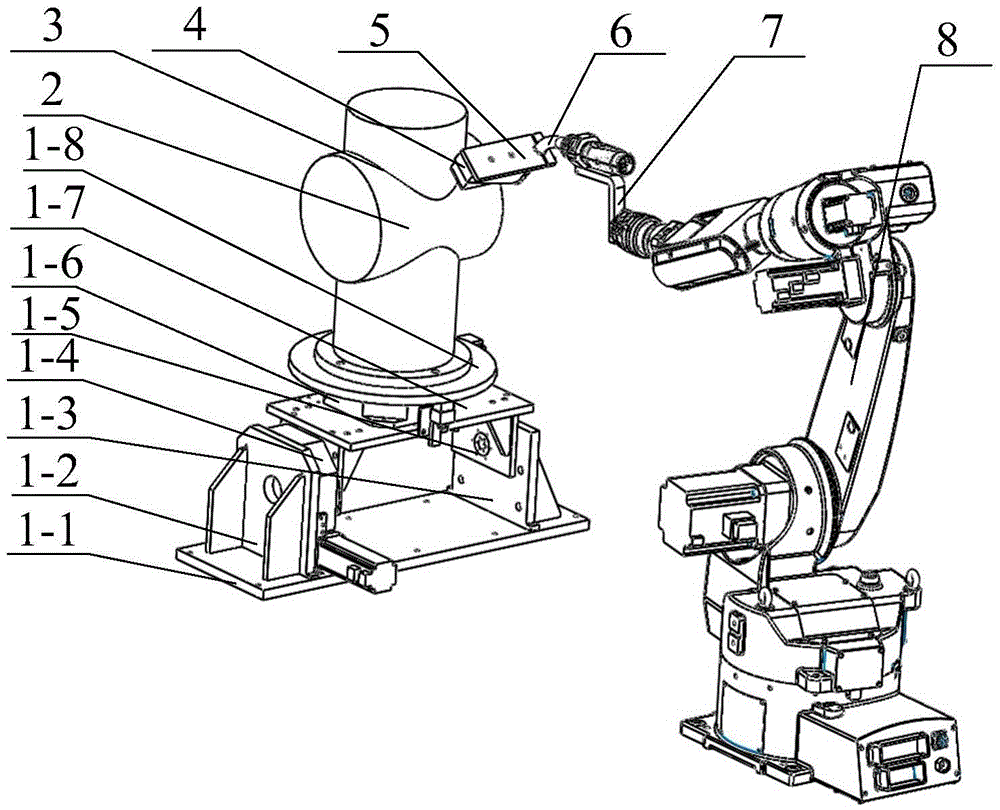
[0044] Such as figure 1 As shown, an 8-axis robot space curve welding system for laser recognition welds, including a tilt / rotation two-axis positioner for fixing workpieces, a laser sensor 4, a laser sensor fixing element 5, a welding torch 6, a welding torch fixing element 7, Welding robot 8, the workpiece is fixed on the tilt / rotation two-axis positioner, following the tilt / rotation two-axis positioner for tilting and / or rotation movement, the laser sensor 4 is installed on the laser sensor fixing element 5, and the laser sensor is fixed The component 5 is clamped on the welding torch 6, the welding torch 6 is installed on the welding torch fixing element 7, the welding torch fixing element 7 is installed on the end flange of the welding robot 8, the laser sensor 4 and the welding torch 6 can follow the movement of the welding robot 8 end.
[0045] The welding robot brings the laser sensor to the position where it is easy to scan the weld seam of the workpiece space curve, ...
Embodiment 2
[0051] An 8-axis robot space curve welding system for laser recognition welding seams, including a tilt / rotation two-axis positioner for fixing workpieces, a laser sensor 4, a laser sensor fixing element 5, a welding torch 6, a welding torch fixing element 7, and a welding robot 8 , the workpiece is fixed on the tilt / rotation two-axis positioner, following the tilt / rotation two-axis positioner for tilting and / or rotation movement, the laser sensor 4 is installed on the laser sensor fixing element 5, and the laser sensor fixing element 5 is installed Clamped on the welding torch 6, the welding torch 6 is installed on the welding torch fixing element 7, the welding torch fixing element 7 is installed on the end flange of the welding robot 8, and the laser sensor 4 and the welding torch 6 can follow the movement of the welding robot 8 end.
[0052] The welding robot brings the laser sensor to the position where it is easy to scan the weld seam of the workpiece space curve, and the...
Embodiment 3
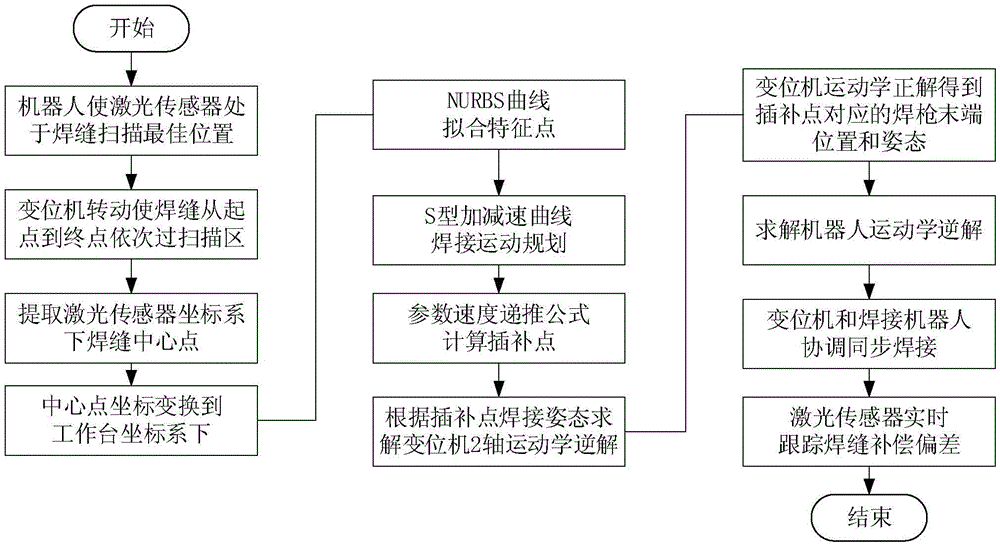
[0059] Such as figure 2 As shown, the laser recognition seam 8-axis robot space curve welding method based on the laser recognition seam 8-axis robot space curve welding system includes the following steps:
[0060] S1. Adjust the position and posture of the welding robot 8 so that the laser sensor 4 fixed on the welding torch 6 is in the best position for scanning the weld 3, that is, the weld 3 is in the effective working range of the laser sensor 4, and the continuous scanning welding is ensured. During the process of sewing 3, the workpiece 2 will not interfere with the laser sensor 4;
[0061] S2. The tilt / rotation two-axis positioner rotates continuously, so that the welding seam 3 passes through the scanning area of the laser sensor 4 sequentially from the starting point to the end point;
[0062] S3. Extract the feature points of the weld 3 from the scanning result of the laser sensor 4, and calculate the coordinates of the center point of the weld 3 under the coor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More