

An adaptive underactuated picking end effector and method
An end-effector and self-adaptive technology, which is applied to harvesting machines, applications, agricultural machinery and implements, etc., can solve problems such as difficulty in grasping, low picking accuracy, cumbersome control, etc., so as to improve the accuracy of clamping and positioning and avoid fruit picking. damage, a wide range of effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
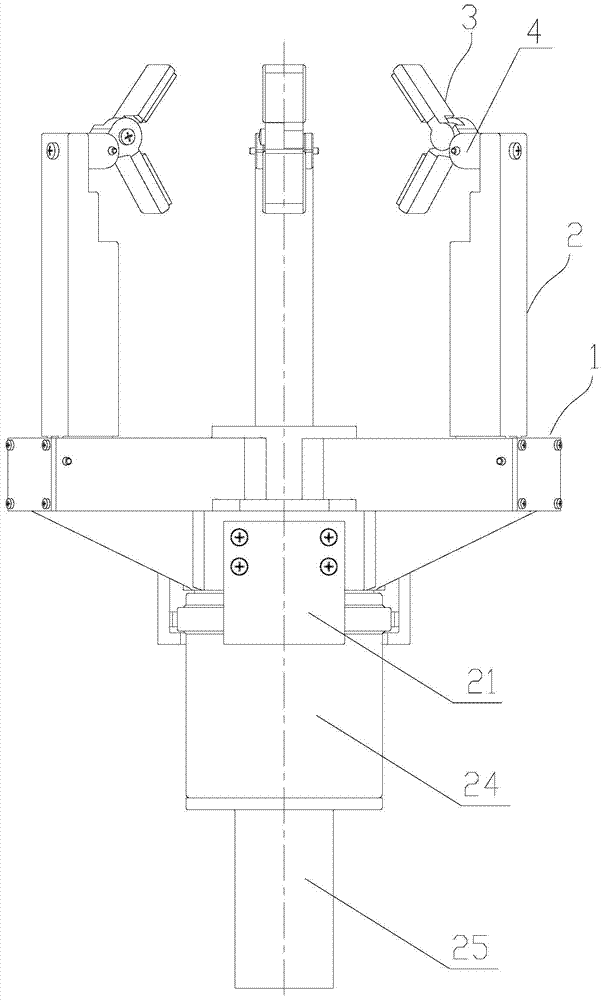
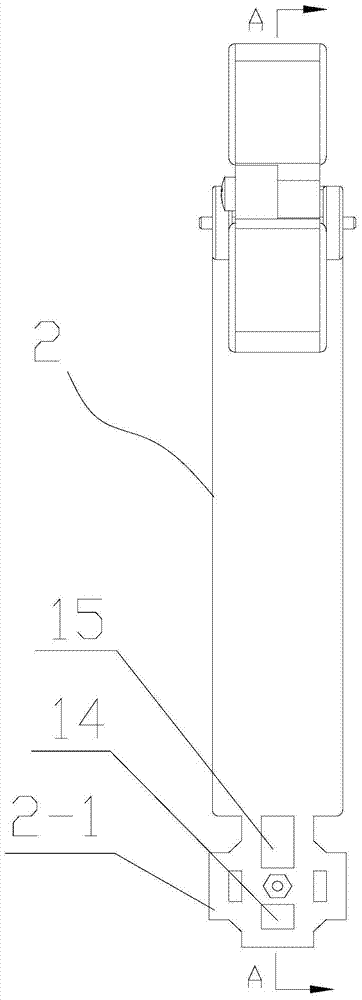
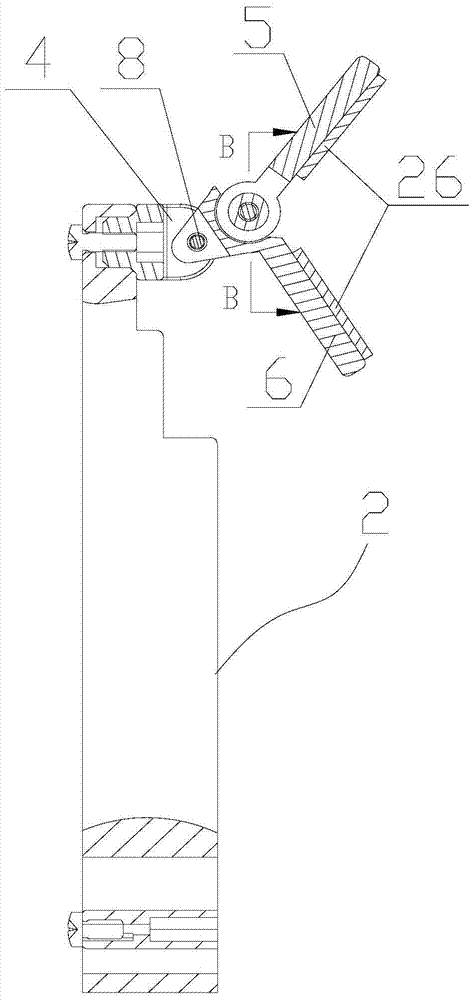
[0041] In this embodiment, an adaptive underactuated picking end effector includes a hand actuator, a drive mechanism and a support assembly, and the hand actuator is connected to the drive mechanism through the support assembly, wherein, as figure 1 As shown, the hand actuator includes a palm 1 and a plurality of fingers 2, the lower ends of each finger are movably connected with the palm respectively, each finger slides along the diameter direction of the palm, and the upper end of each finger is provided with a reversible V-shaped finger end 3, such as figure 2 or image 3 As shown, the V-shaped fingertip includes a knuckle reversing button 4, a first movable knuckle 5 and a second movable knuckle 6, and an angle-adjustable fixed connection is between the first movable knuckle and the second movable knuckle. The second movable knuckle is hinged with the knuckle reversing button, and the knuckle reversing button is connected with the upper end of the finger. Wherein, the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More