

Homography estimation and extended Kalman filter based localization method for unmanned aerial vehicle (UAV)
An extended Kalman and unmanned aerial vehicle technology, which is applied in calculation, photo interpretation, image data processing, etc., can solve the problems of increasing cumulative error of position estimation and inaccurate position parameter estimation results, so as to improve the accuracy of position estimation, The effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
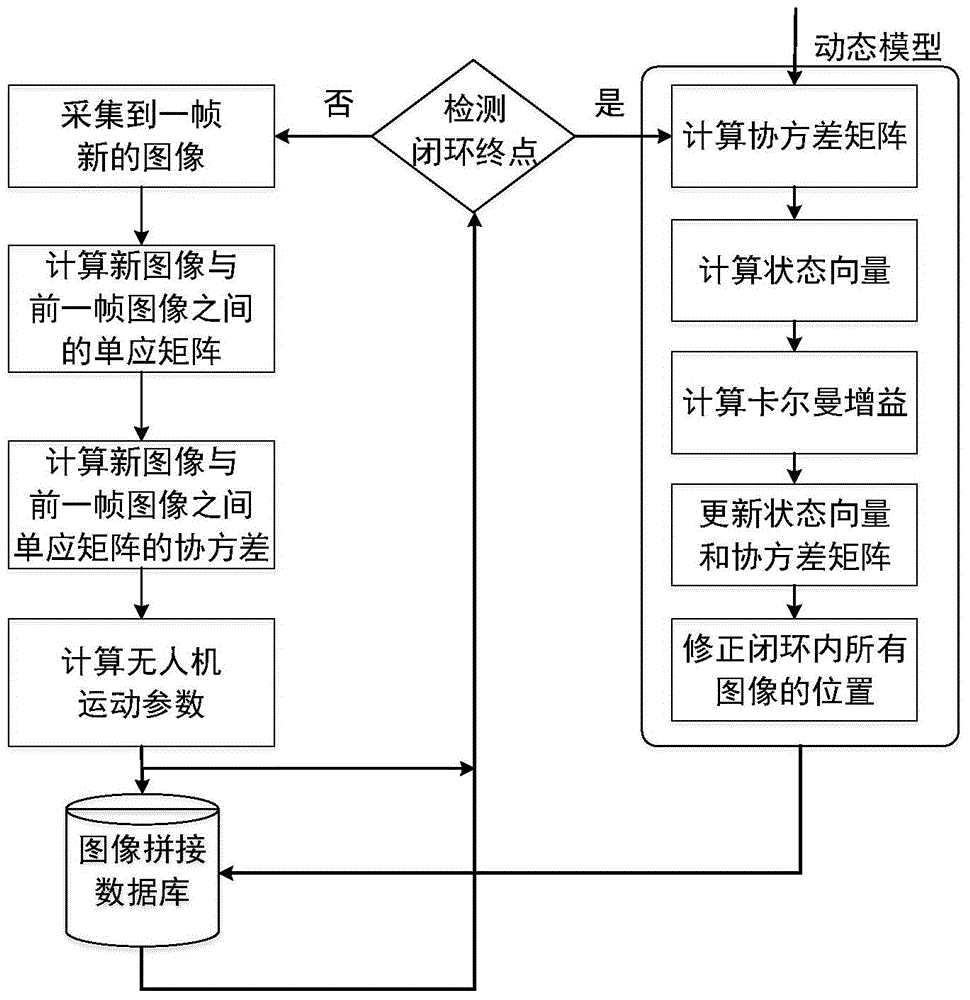
[0037] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
[0038] The present invention mainly includes two core parts: A, estimation of homography matrix and description of estimation uncertainty. B. Position estimation based on extended Kalman filter. Its implementation steps are as follows:
[0039] Step 1, robust estimation of the homography matrix;
[0040]Step 2, the description of the estimation uncertainty of the homography matrix;
[0041] Step 3, motion estimation based on homography;
[0042] Step 4, update the image mosaic database;
[0043] Step 5, position estimation based on extended Kalman filter.
[0044] The specific embodiment process is as follows figure 1 shown.
[0045] 1. Robust estimation of homography matrix
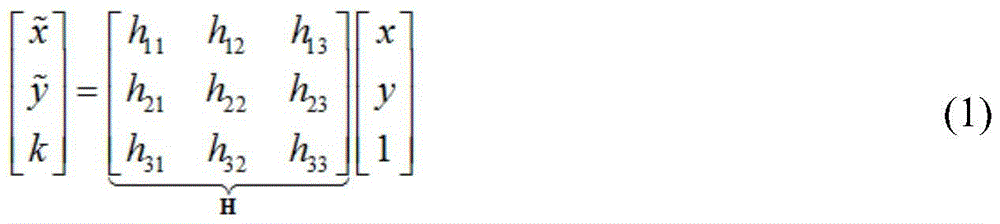
[0046] In homogeneous coordinates, any homography can be expressed as the following reversible linear transformation:
[0047]
[0048] Among them, H is the homography matrix, [...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More