

Low-latency omni-directional navigation video multi-mode display control method
A display control method and video display technology, which are applied to TVs, color TVs, components of color TVs, etc., to achieve the effect of small delay
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
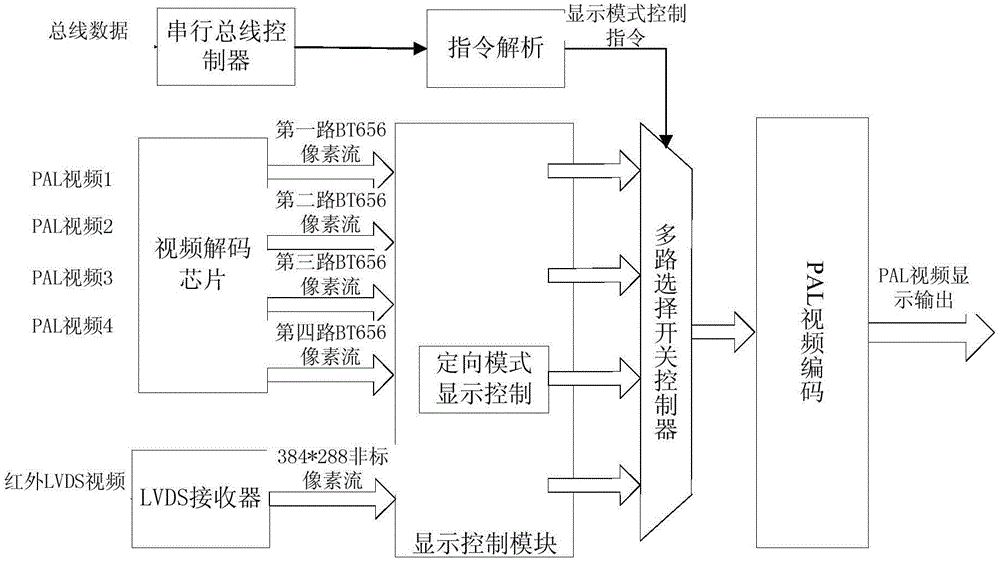
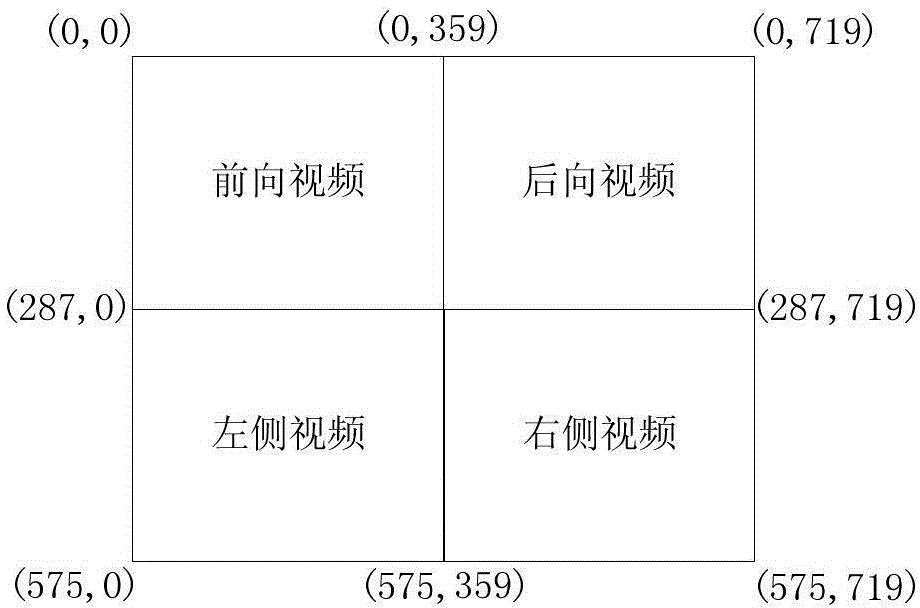
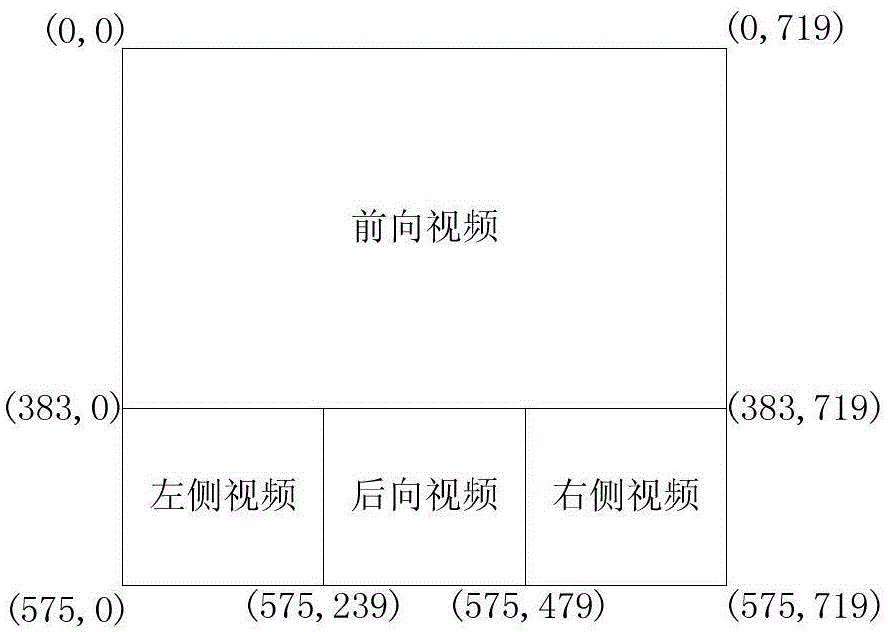
[0020] The invention uses FPGA to manage the acquisition and processing of the infrared camera carried by the unmanned reconnaissance robot and the four-channel visible light camera, uses the serial communication bus to receive the control instructions sent by the control terminal, and designs the hardware logic circuit according to the cruise display mode and navigation display mode , directional reconnaissance display mode and image enhancement display mode seamlessly stitch and superimpose multi-source videos, and integrate them into a PAL format video display on the main display of the control terminal; use iterative fast bilateral filtering algorithm to enhance the input video before displaying Processing, removing the fog interference in the picture and zooming in on detailed information, to achieve all-round acquisition and control of the battlefield situation. The implementation details are as follows:
[0021] 1) Decode the four PAL standard cameras carried forward, b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More