

Multi-motor motion synchronization improved adjacent coupling control method based on active disturbance rejection
A multi-motor motion and control method technology, applied in multiple motor speed/torque control, motor control, control system and other directions, can solve the problems of small error, poor synchronous control performance, strong robustness of multi-motor system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0089] The present invention will be further described below in conjunction with the accompanying drawings.
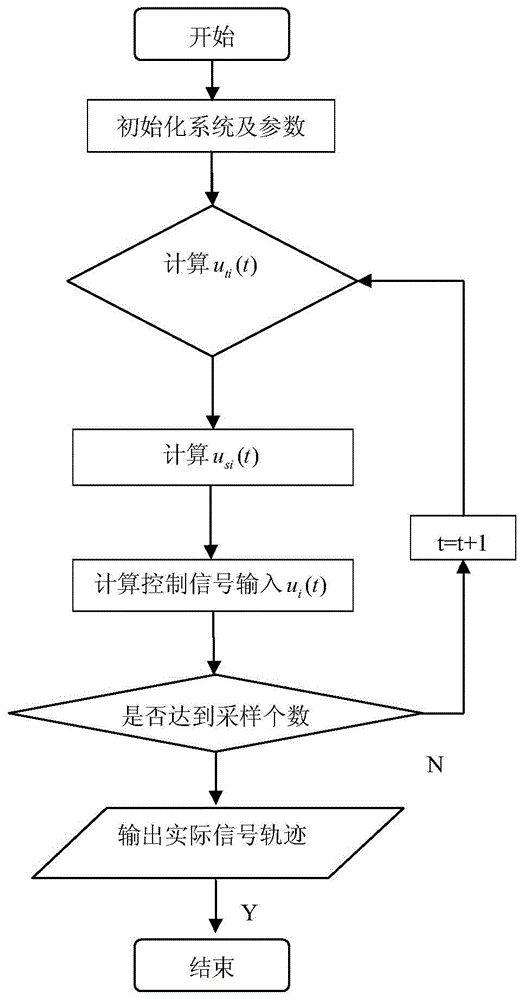
[0090] refer to figure 1 - Fig. 6, a multi-motor improved adjacent coupling control method based on ADRC, including the following steps:
[0091] Step 1, establish a permanent magnet synchronous motor mathematical model, and give control parameters;
[0092] 1.1, A surface-mounted permanent magnet synchronous motor is used as a drive motor, and its mathematical model under the quadrature-direct (d-q) axis is:
[0093]
[0094] Among them, u d ,u q respectively represent the d-axis voltage and q-axis voltage of the stator; i d ,i q respectively represent the d-axis current and q-axis current of the stator; ψ d ,ψ q Respectively represent the d-axis flux linkage and q-axis flux linkage of the stator; L d , L q are the inductances of the stator windings on the d and q axes, respectively; ψ f Indicates the flux linkage generated by the permanent magnet of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More