

Human lower limb exoskeleton assisting in load bearing
A technology of exoskeleton and lower limbs, which is applied in the field of human lower limb exoskeleton, which can solve the problems of small rigidity, short battery life, high cost, etc., and achieve the effect of large carrying capacity, long battery life and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] Further describe the present invention below in conjunction with embodiment and accompanying drawing thereof. The specific embodiments are only used to describe the lower extremity exoskeleton of the present invention in detail, and do not limit the protection scope of the claims of the present application.
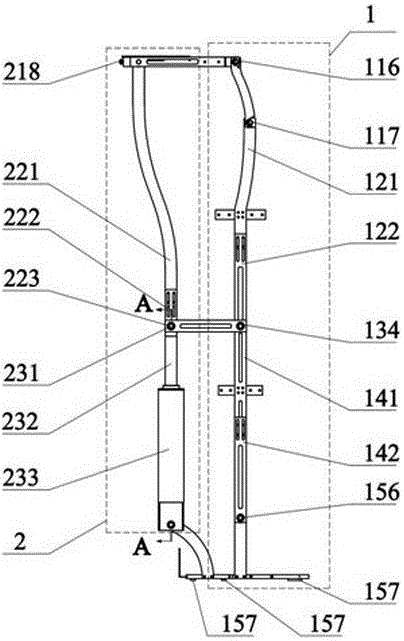
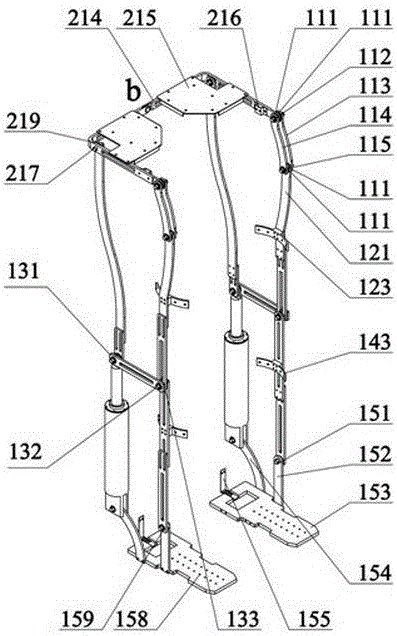
[0016] The auxiliary weight-bearing human lower limb exoskeleton designed by the present invention (exoskeleton for short, see Figure 1-5 ) is a centrally symmetrical structure, and each side of the exoskeleton includes two major parts, the front branch chain 1 and the rear branch chain 2.
[0017] The front branch chain 1 includes a waist and hip joint module 11, a thigh module 12, a knee joint module 13, a calf module 14, an ankle joint and a foot module 15; The upper end of the module 12 is connected, the lower end of the thigh module 12 is connected with the upper end of the calf module 14 and the front end of the knee joint module 13 through the thigh rotati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More