

Indoor 3D positioning system and method based on inertial sensor
An inertial sensor and positioning system technology, applied in the field of indoor 3D positioning systems based on inertial sensors, can solve the problems of complex floor structure, lack of height information, and reduced positioning accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
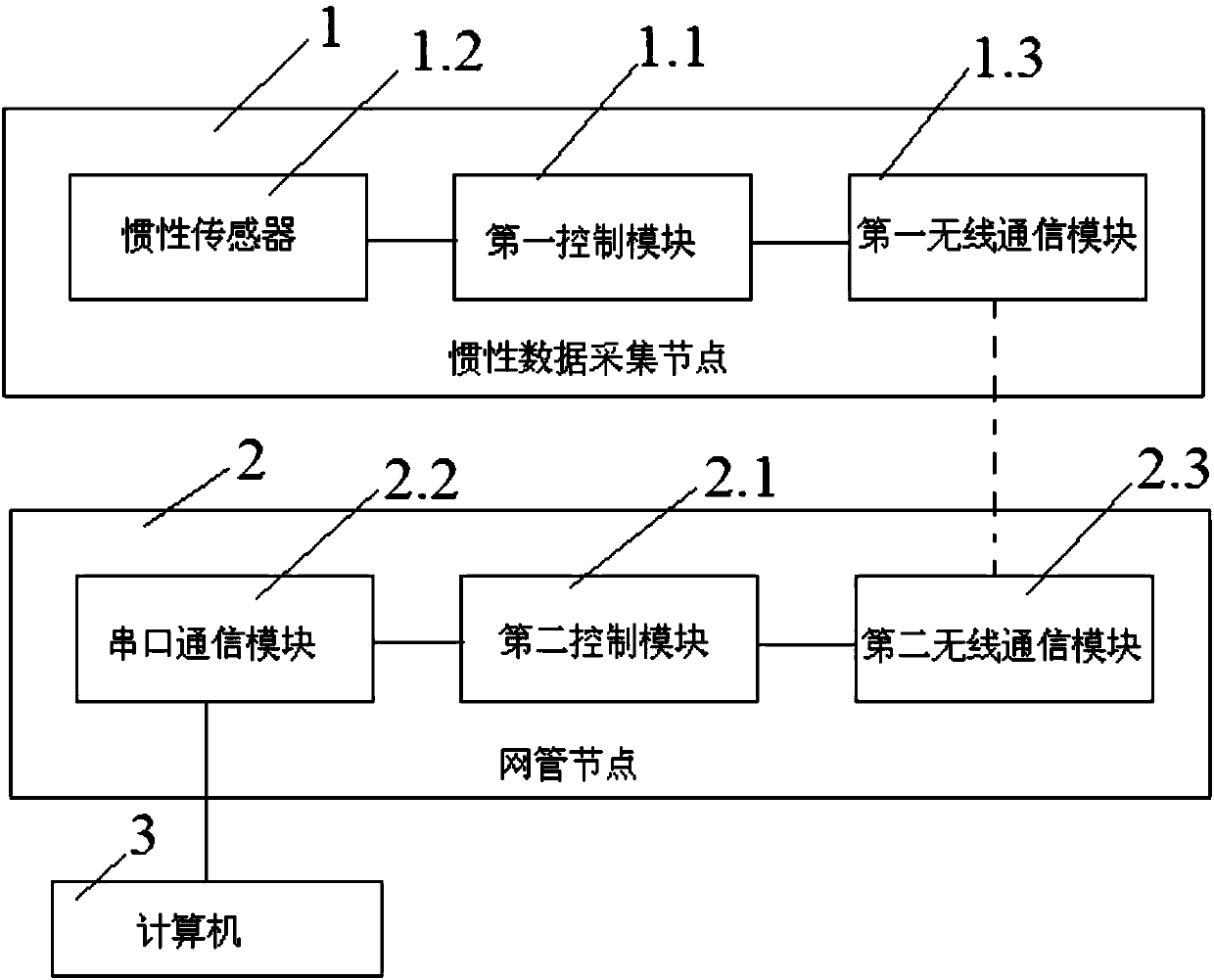
[0074] Such as figure 1 The indoor 3D positioning system based on inertial sensors includes an inertial data acquisition node 1, a network management node 2 and a computer 3, wherein the inertial data acquisition node 1 includes a first control module 1.1, an inertial sensor 1.2 and a first wireless Communication module 1.3, the network management node 2 includes a second control module 2.1, a serial port communication module 2.2 and a second wireless communication module 2.3, wherein the signal output end of the inertial sensor 1.2 is connected to the signal input end of the first control module 1.1, the first The signal output end of the control module 1.1 is connected to the signal input end of the first wireless communication module 1.3, the signal output end of the second wireless communication module 2.3 is connected to the signal input en...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More