

A kind of aerospace mechanical arm based on shape memory polymer and dielectric elastomer and its manufacturing method
A technology of memory polymers and dielectric elastomers, applied in manipulators, program-controlled manipulators, claw arms, etc., can solve problems such as high requirements for transportation and working environment, waste of capacity due to its own weight, complex structure, etc., and achieve stable and reliable working conditions , not prone to mechanical problems, and the effect of reducing space and payload
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
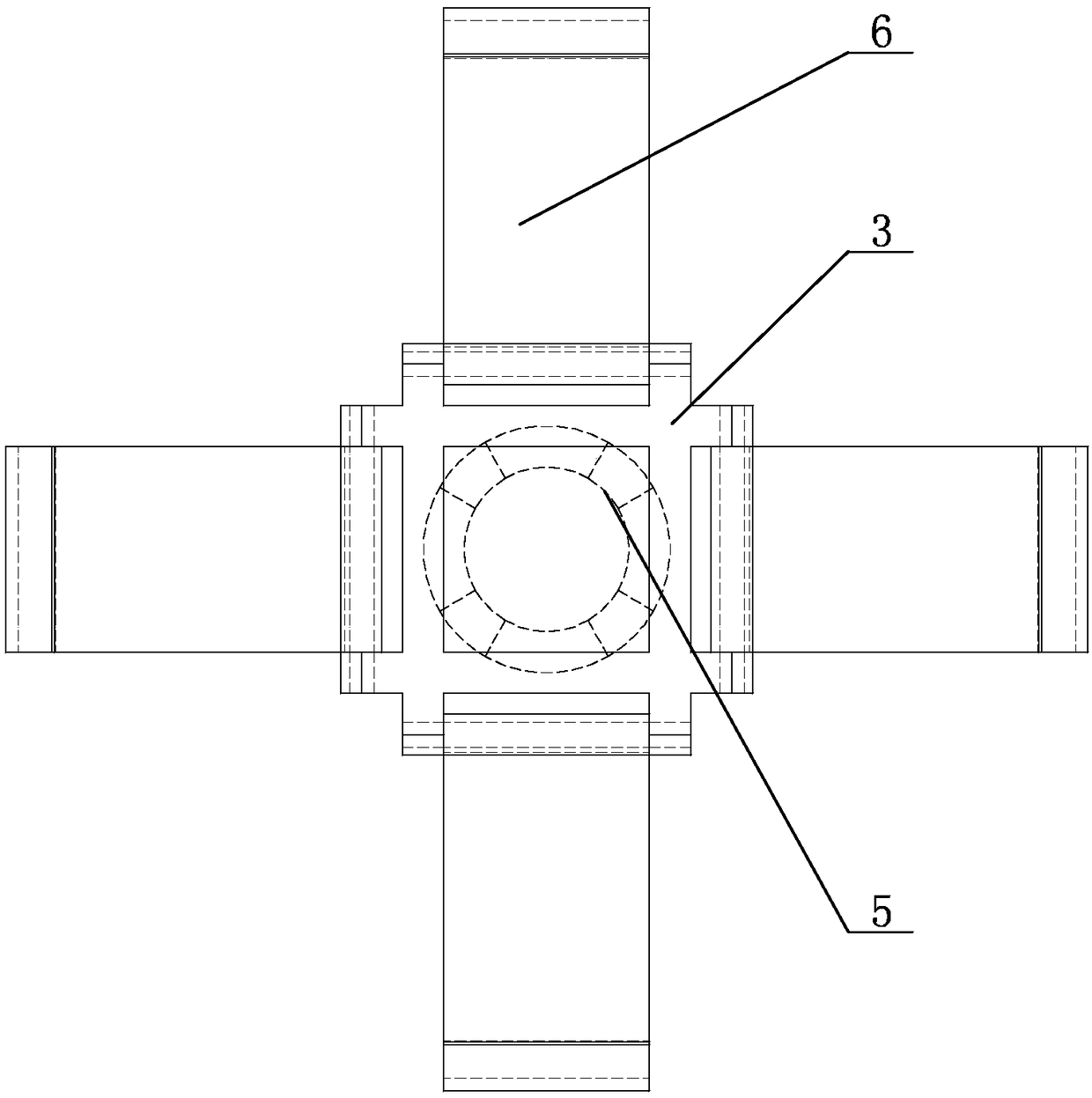
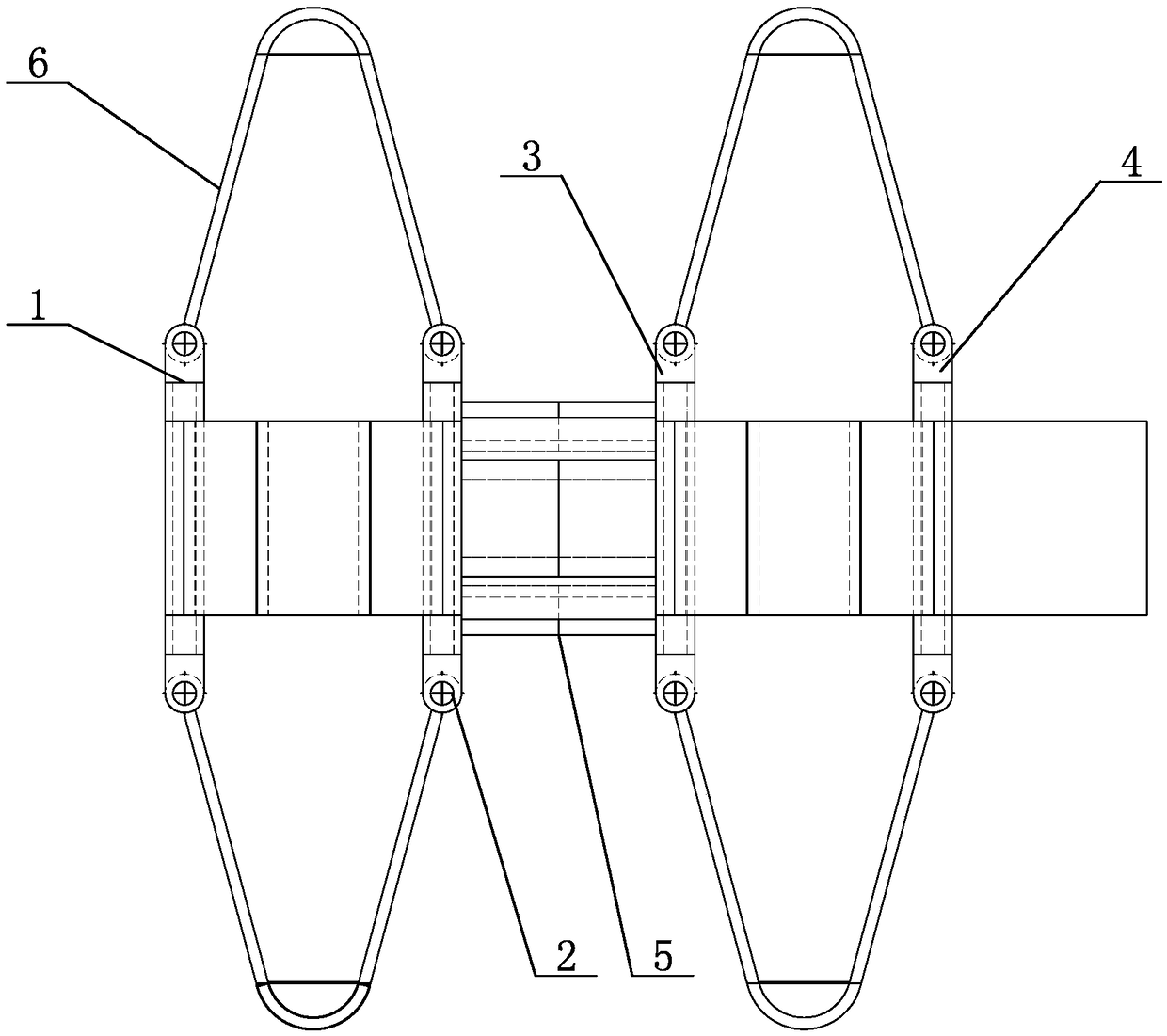
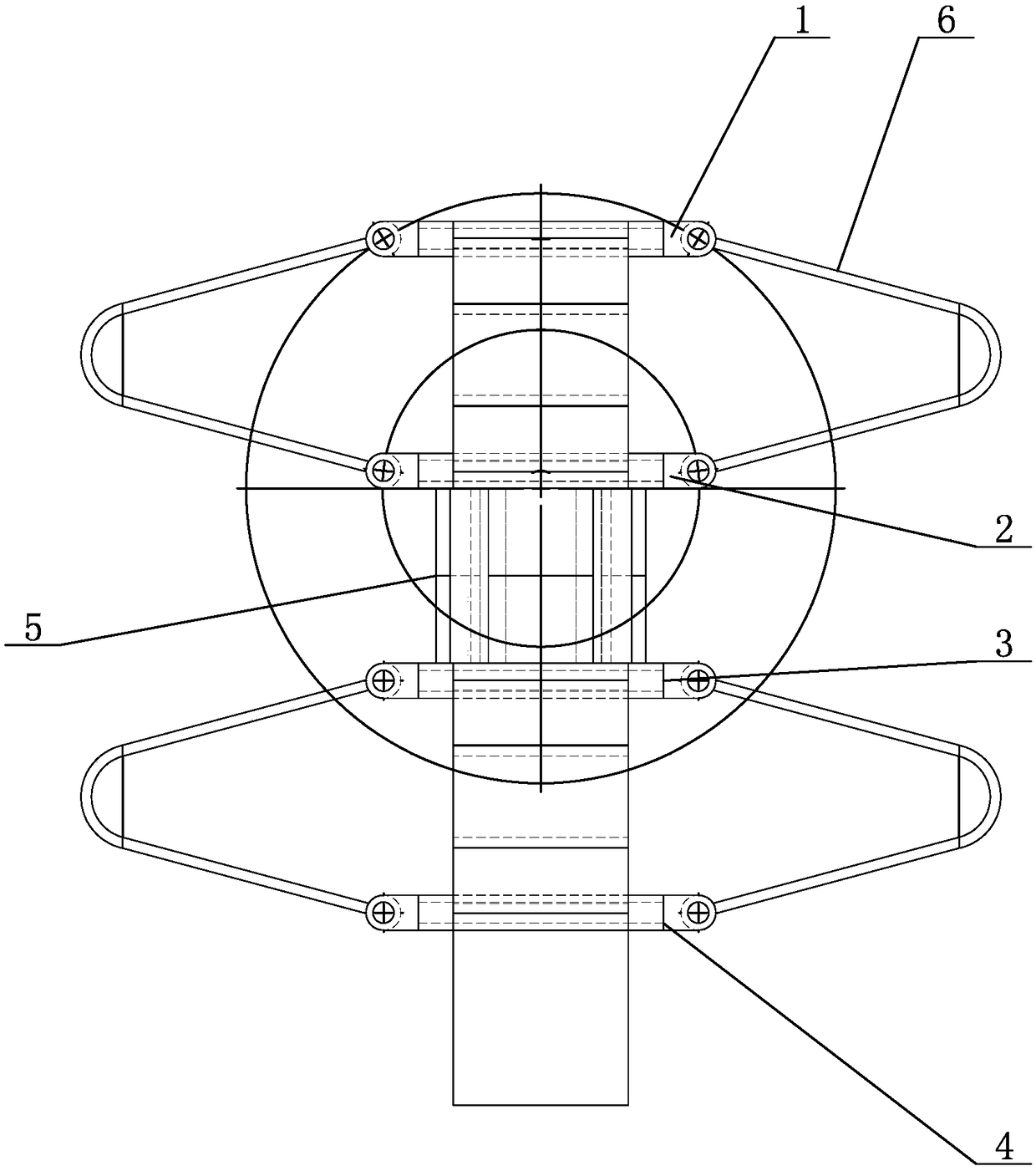
[0017] Specific implementation mode one: combine Figure 1 to Figure 7 Describe this embodiment, the aeromechanical arm based on shape memory polymer and dielectric elastomer in this embodiment includes a first base 1, a second base 2, a third base 3, a fourth base 4, a dielectric elastic body cylinder 5 and two tensile assemblies, each of which is a cuboid composed of four shape memory polymer plates 6, the first base 1 is connected to the second base 2 through one of the tensile assemblies, the second The second base 2 is connected with the third base 3 through a dielectric elastomer cylinder 5, and the third base 3 is connected with the fourth base 4 through a said stretching assembly, and the four directions of each end surface of the dielectric elastomer cylinder 5 are Coated with electrodes 7 .
[0018] In this embodiment, the voltage of the dielectric elastomer at different places is provided by an additional control device, and different voltages are applied to the el...
specific Embodiment approach 2
[0021] Specific implementation mode two: combination Figure 1 to Figure 7 To illustrate this embodiment, a manufacturing method of an aerospace manipulator based on a shape memory polymer and a dielectric elastomer described in this embodiment is realized through the following steps:
[0022] Step 1: add reinforcing materials to the shape memory polymer to make a flat plate of shape memory polymer composite material, cover the two sides of the flat plate with electric heating film, use a dielectric elastomer film whose size is smaller than that of the shape memory polymer composite material, and place on the surface of the film Both sides are covered with metal or graphite electrodes, and the dielectric elastomer film is attached to both sides of the flat plate to form a shape-memory polymer flat plate 6, so that the edge of the dielectric elastomer thin film is attached to the shape-memory polymer flat plate;
[0023] Step 2. Arranging four shape-memory polymer plates 6 in o...
specific Embodiment approach 3
[0026] Specific implementation mode three: combination Figure 1 to Figure 7 To illustrate this embodiment, the shape memory polymer in step 1 of the manufacturing method of an aerospace manipulator based on a shape memory polymer and a dielectric elastomer in this embodiment is an epoxy-based thermoplastic shape memory polymer, a ring One or more of oxygen-based thermosetting shape-memory polymers, styrene-based shape-memory polymers, and cyanate-based shape-memory polymers. Other components and connections are the same as those in the second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More