

Delta robot control system with traction visual teaching function
A control system and robot technology, applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve the problems of poor site adaptability and single trajectory, and achieve the effects of low maintenance cost, convenient control operation, and high speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with specific embodiments. It should be understood that these examples are only used to illustrate the present invention and not to limit the scope of the present invention. In addition, it should be understood that after reading the content taught by the present invention, those skilled in the art can make various changes or modifications to the present invention, and these equivalent forms also fall within the scope defined by the appended claims of the present application.
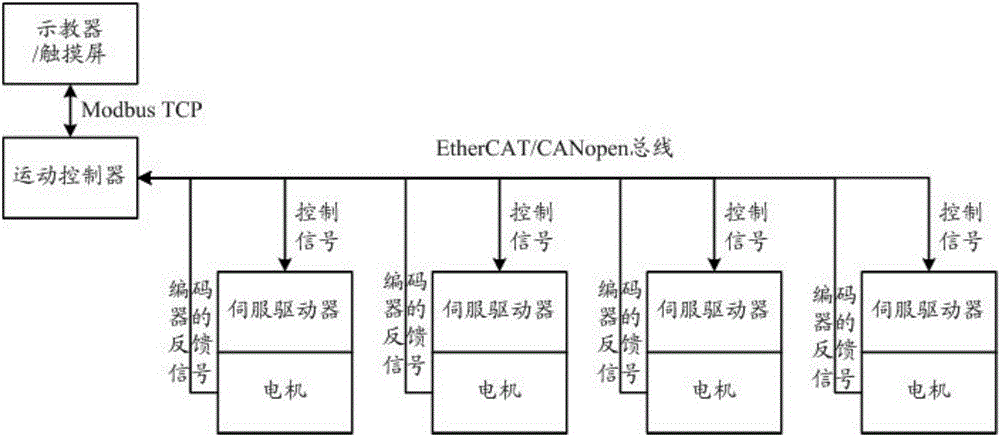
[0028] Embodiments of the present invention relate to a Delta robot control system with a traction video teaching function, such as figure 1 shown, including a motion controller, multiple servo drives, motors, I / O expansion modules, and a vision tracking system. The motion controller of the present invention controls multiple servo drives, motors, I / O expansion modules and vision systems through Ehtercat / CANopen bus. The four ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More