

Error-separation-mode-based regional pseudo-range differential enhanced positioning method of GNSS
A pseudo-range differential and enhanced positioning technology, which is applied in satellite radio beacon positioning systems, measuring devices, instruments, etc., can solve the problems of difficulty in further improving positioning accuracy, high complexity of system implementation, and poor accuracy of grid ionosphere
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
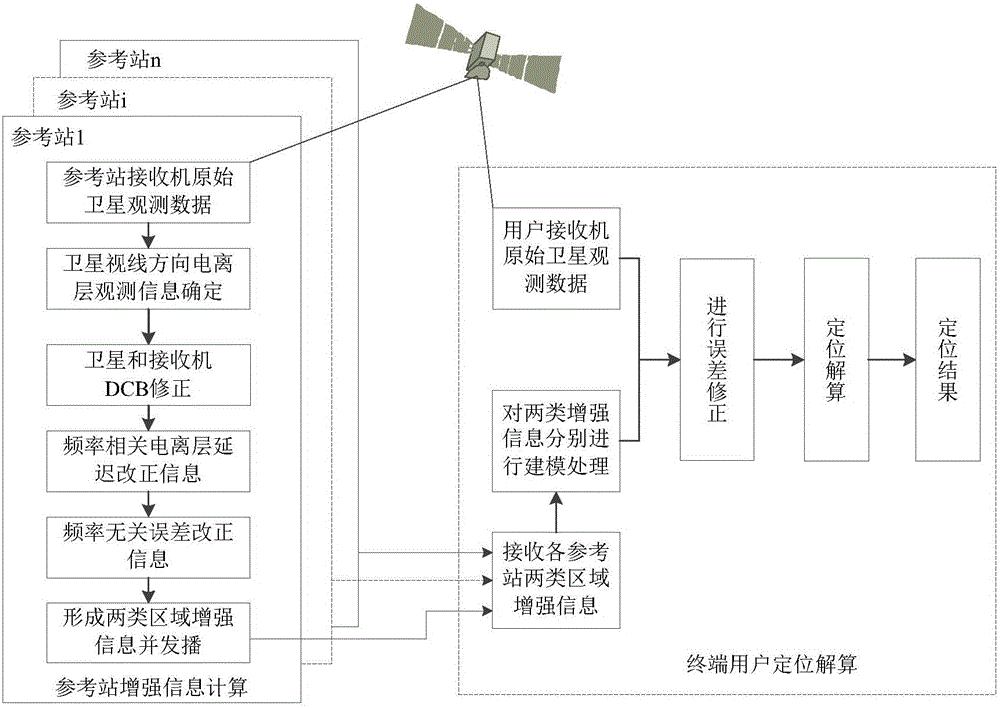
[0055] Embodiment 1, a kind of GNSS regional pseudo-range differential enhanced positioning method based on error separation mode, comprises the following steps:
[0056] Step 1. The global satellite navigation system GNSS regional pseudo-range differential enhanced positioning adopts n reference stations and one end user; any one of the reference stations has its receiver r receive the original satellite observation data, and then perform the following processing to obtain the reference station r The error vector correction number of satellite s; the original satellite observation data includes pseudo-range observation and carrier phase observation.
[0057] S101. Establish the GNSS non-difference observation equation, wherein the ionospheric delay error, hardware delay deviation and integer ambiguity are frequency-dependent items, and other error items are frequency-independent items, through the geometry of observations of the same type at two or more frequencies The irrele...
Embodiment 2
[0063] Embodiment 2. On the basis of Embodiment 1, this embodiment uses specific examples to describe Embodiment 1 in detail, and the parameters are only used as examples for convenience, and do not involve limitations on Embodiment 1.
[0064] Step 1. Obtain the original satellite observation data of the receiver of the reference station, and obtain the error vector correction number of the reference station r with respect to the satellite s after processing.
[0065] Generally, the pseudorange and carrier phase observation equations of the GNSS non-difference observation model are:
[0066] P r , f i s = ρ r s ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More