

Determination method and apparatus for poses of mobile robot
A mobile robot, pose technology, applied in the field of mobile robot positioning and navigation, can solve the problems of complex indoor environment, position and heading angle errors, etc., and achieve the effect of high flexibility and strong applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present disclosure will be described more fully hereinafter with reference to the accompanying drawings, in which embodiments of the disclosure are shown. These embodiments may, however, be embodied in many different forms and should not be construed as limited to the embodiments set forth herein. Rather, these examples are provided so that this disclosure will be thorough and complete, and will fully convey the scope of the disclosure to those skilled in the art.
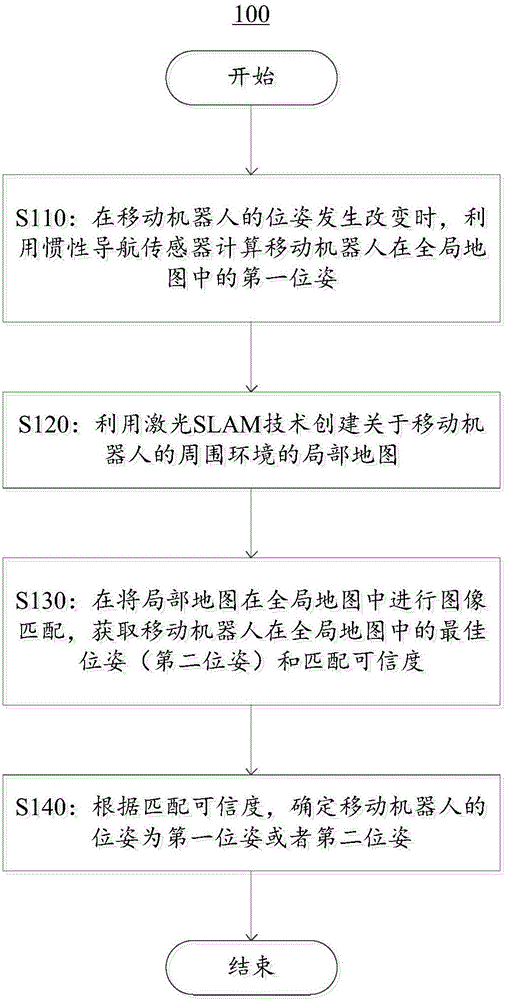
[0034] refer to figure 1 , which illustrates a flowchart of a mobile robot pose determination method 100 according to an embodiment of the present invention. Mobile robots include laser scanners and inertial navigation sensors.
[0035] In step S110, when the pose of the mobile robot changes, the inertial navigation sensor is used to calculate the first pose of the mobile robot in the global map. A global map may be pre-created for the environment in which the mobile robot moves. Using the laser scan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More