

Robotic control of surgical instrument visibility
A technology of robots and instruments, applied in the field of robot control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
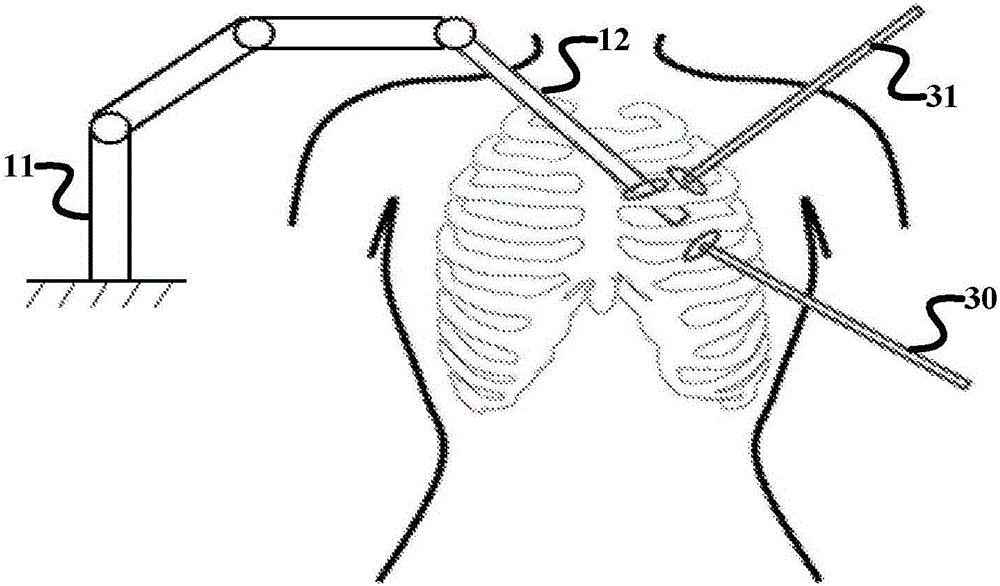
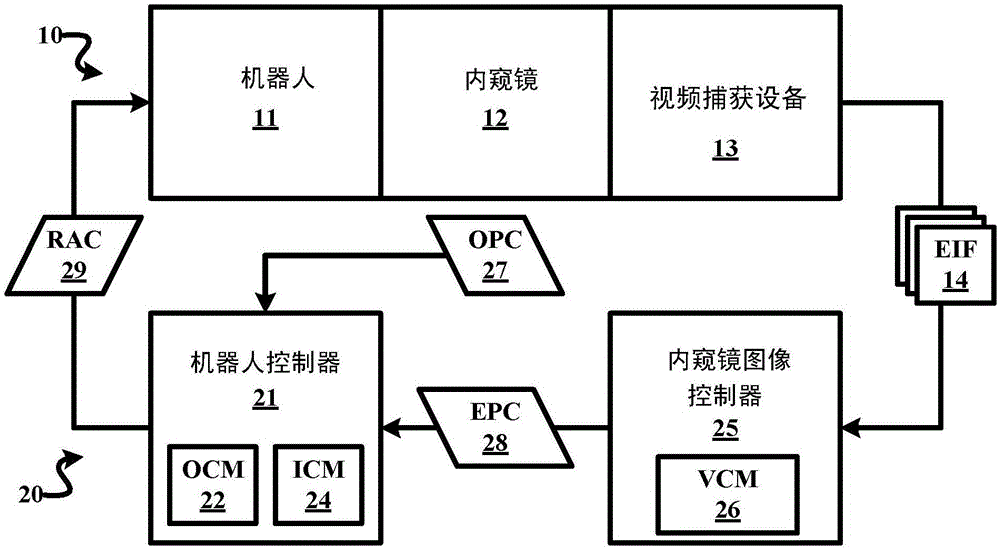
[0020] Such as figure 2 As shown, the robotic guidance system employs a robotic unit 10 and a control unit 20 for any endoscopic procedure involving endoscopic imaging of an anatomical region (eg, cranial region, thoracic region, abdominal region, patella region, etc.). Examples of such endoscopic procedures include, but are not limited to, minimally invasive cardiac surgery (e.g., coronary artery bypass grafting or mitral valve replacement), laparoscopic surgery (e.g., hysterectomy, prostatectomy, and gallbladder surgery), Natural Oral Endoscopic Surgery (NOTES), Single Incision Laparoscopic Surgery (SILS), Lung / Bronchoscopic Surgery, and Minimally Invasive Diagnostic Interventions (eg, Arthroscopy).
[0021] The robotic unit 10 comprises a robot 11 , an endoscope 12 rigidly attached to the robot 11 and a video capture device 13 attached to the endoscope 12 .
[0022] Herein, a robot 11 is broadly defined as any robotic device structurally configured with motorized control f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More