

Four-rotor aircraft parameter measuring and modeling method
A four-rotor aircraft and parameter measurement technology, applied in the field of unmanned aerial vehicles, can solve problems such as difficulty in implementation, high cost, and difficulty in obtaining accurate values
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0032] In order to further illustrate the technical solution of the present invention, the present invention is described in detail with reference to the accompanying drawings.
[0033] The method for low-cost parameter identification of a quadrotor aircraft in the present invention specifically includes the following steps:
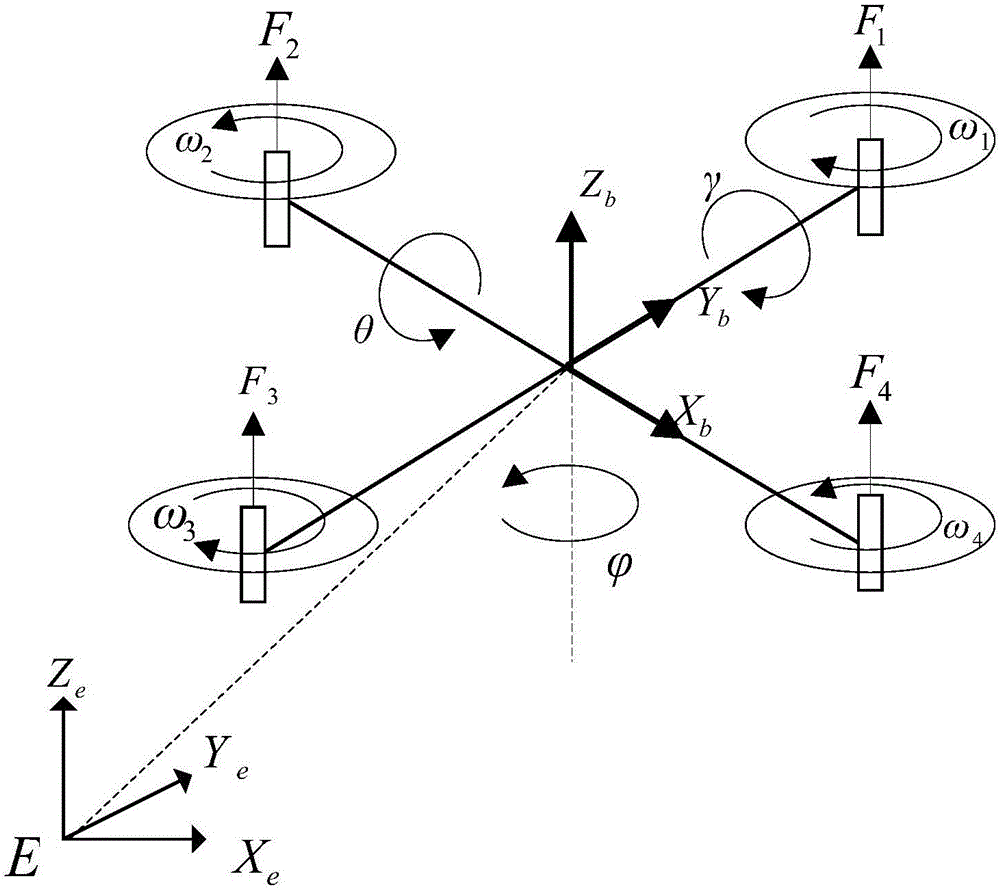
[0034] Step S1: Establish a kinetic model:
[0035] Such as figure 1 Shown is a schematic diagram of the dynamics model of the quadrotor UAV in the present invention. The force on the body mainly comes from four aspects: 1. The influence of the rigid body motion on the body, 2. The gyroscopic effect of the rotor on the force on the body, 3. The aerodynamic effect of the rotor on the force on the body, 4. Air Resistance is the force exerted on the body. The four influences are superimposed on each other to form a quadrotor dynamics model. In order to establish the dynamic model of the quadrotor UAV, two coordinate systems are defined first: the naviga...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More