

Automatic extraction method for road vector mark lines in vehicle-mounted laser scanning point cloud
A vehicle-mounted laser scanning and vector marking technology is applied in the field of automatic extraction of road vector marking lines in vehicle-mounted laser scanning point clouds, which can solve the problems of less research and no extraction method, and achieves simple operation, improved efficiency and accuracy, and is feasible. high sex effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
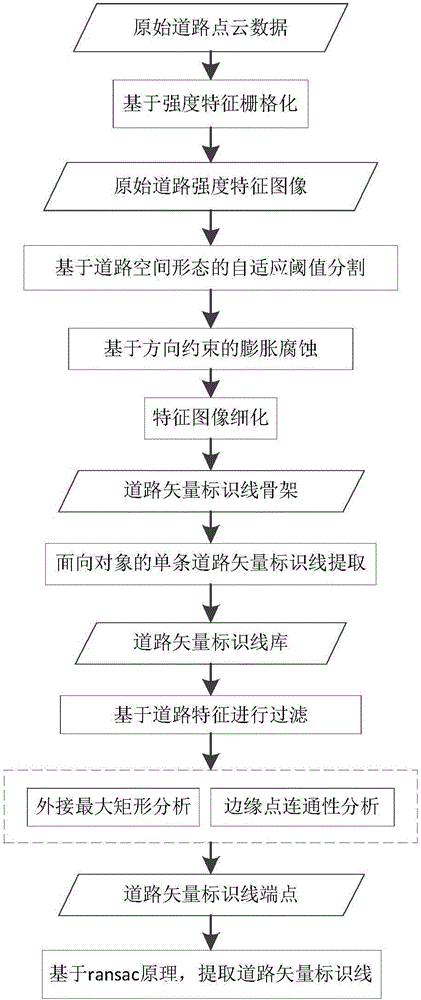
[0043] The basic idea of the present invention is: according to the spatial distribution characteristics and intensity information of the vehicle-mounted laser scanning point cloud, the method of image processing is used, and the idea of object-oriented extraction is used to extract the marking line in combination with the geometric characteristics of the marking line.
[0044] combine figure 1 As shown, a method for automatically extracting road vector marking lines in a vehicle-mounted laser scanning point cloud includes the following steps:
[0045] a. According to the original road laser scanning point cloud data, an intensity-based feature image is generated through projection;
[0046] b. Use the adaptive threshold method based on the road space shape to segment the feature image, and separate the road background from the road vector marking line target.
[0047] Among them, the segmentation process of the feature image based on the adaptive threshold method of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More