Multi-degree-of-freedom controllable mechanism type branch pruning mechanical hand
A mechanism-type, manipulator technology, applied in the field of machinery, can solve the problems of high machining accuracy requirements of hydraulic systems, large rotational inertia of working devices, high maintenance costs, and achieve improved stability and work efficiency, compact structure, and large working space. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
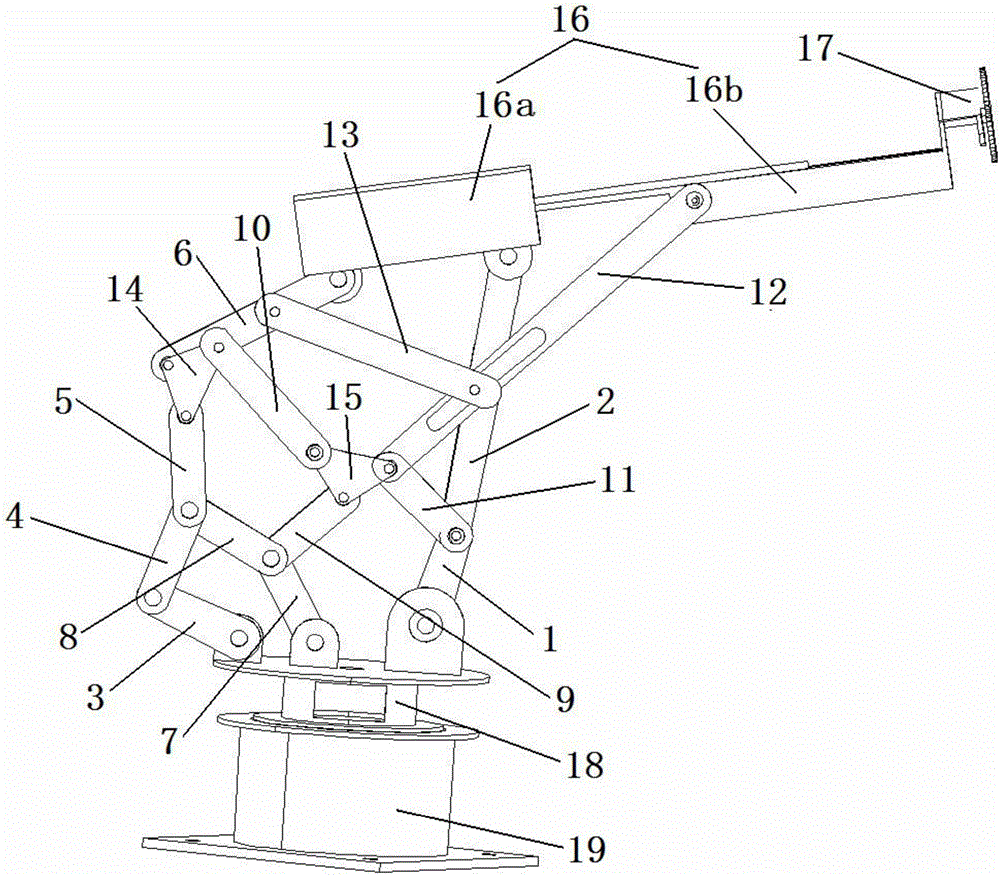
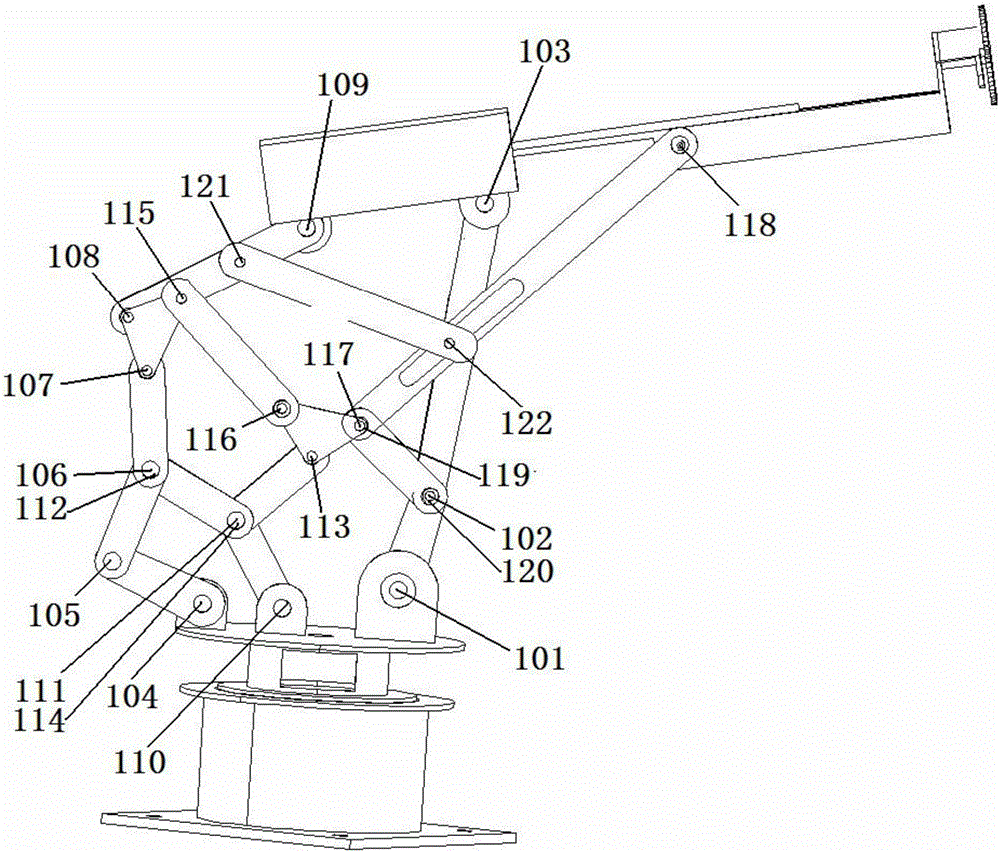
[0022] A multi-degree-of-freedom controllable mechanism tree pruning manipulator, comprising a base 19, a frame 18, a telescopic rod 16, an actuator 17, a first triangular connecting piece 14, a second triangular connecting piece 15, a first connecting rod 1, a first connecting rod Two link 2, third link 3, fourth link 4, fifth link 5, sixth link 6, seventh link 7, eighth link 8, ninth link 9, tenth link Rod 10, eleventh link 11, twelfth link 12 and thirteenth link 13;
[0023] One end of the first connecting rod 1 is connected to the frame 18 through a rotating pair 101, the other end of the first connecting rod 1 is connected to one end of the second connecting rod 2 through a rotating pair 102, and the other end of the second connecting rod 2 is connected through a rotating pair three. 103 is connected to the rear section 16a of the telescopic rod 16,
[0024] One end of the third connecting rod 3 is connected to the frame 18 through a rotating pair 104, the other end of the th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More