

Design Method of Nonlinear Controller for Inverted Pendulum
A design method, inverted pendulum technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of difficult online control, large number, complex realization process, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
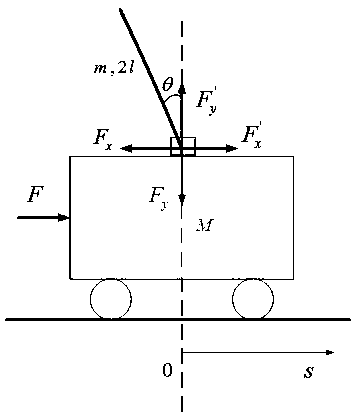
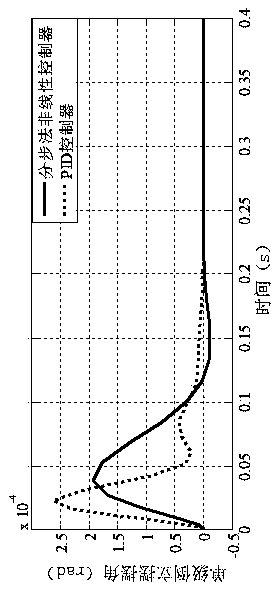
[0058] Based on the mechanics and kinematics equations of the single-stage inverted pendulum system, the mathematical model of the single-stage inverted pendulum system is established. A non-linear control method of the inverted pendulum with feed-forward control, steady-state control and feedback control is designed by using the step-by-step method, and the high-precision control of the single-stage inverted pendulum is realized.
[0059] Establish a nonlinear model of the inverted pendulum system; design a steady-state controller, input the control law when the system output reaches a steady state into the system, and obtain a faster control response; design a reference dynamic feedforward controller, when the desired reference input When the dynamic changes, the corresponding adjustment effect of the system is introduced into the system to obtain the feedforward control law gain related to the system state; the feedback controller is designed, and the feedback controller is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More