

A Calibration Method of Industrial Robot Kinematic Parameters Based on Linear Displacement Sensor
A technology of robot kinematics and industrial robots, applied in the field of robots, can solve problems such as low precision and limited application, and achieve the effects of easy implementation, improved absolute positioning accuracy, and simple structure of the method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0023] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
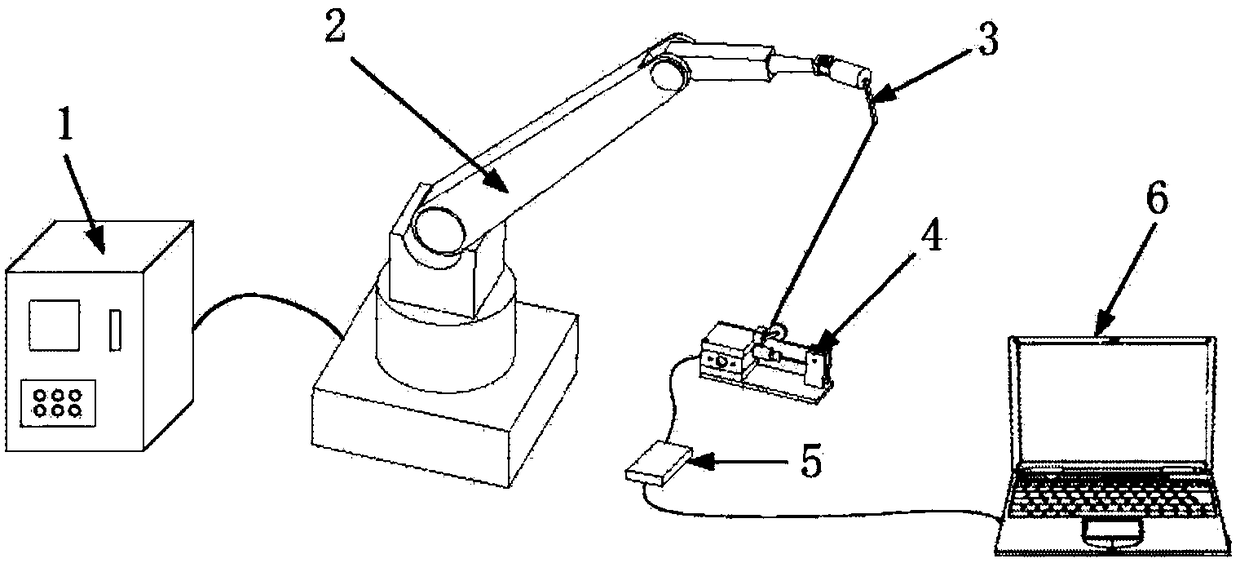
[0024] Such as figure 2 shown. The linear displacement sensor uses a wire sensor, and of course other sensors, such as a laser tracker, can also be used. The calibration system consists of a robot controller 1, an industrial robot to be calibrated 2, a connecting rod 3, a cable sensor 4, a data acquisition card 5 and a computer 6. The basic process is: the industrial robot 2 to be calibrated is installed in a fixed position, the end flange of the industrial robot is equipped with a connecting rod 3 matching the cable sensor, and the cable sensor 4 is placed as fixedly as possible in the working space of the industrial robot. In principle, the position of the cable sensor can be arbitrary, and the industrial robot 2 to be calibrated moves to different positions in space under the drive of the robot controller 1, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More