

Rotor unmanned aerial vehicle automatic cruise method and system based on deep learning
An unmanned rotor, deep learning technology, applied in control/regulation systems, navigation calculation tools, non-electric variable control and other directions, can solve the problems of planning dependence, obstacle avoidance failure, inaccurate detection, etc., to save manpower and facilitate management Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] Below in conjunction with accompanying drawing and specific embodiment the technical solution of the present invention is described in further detail:
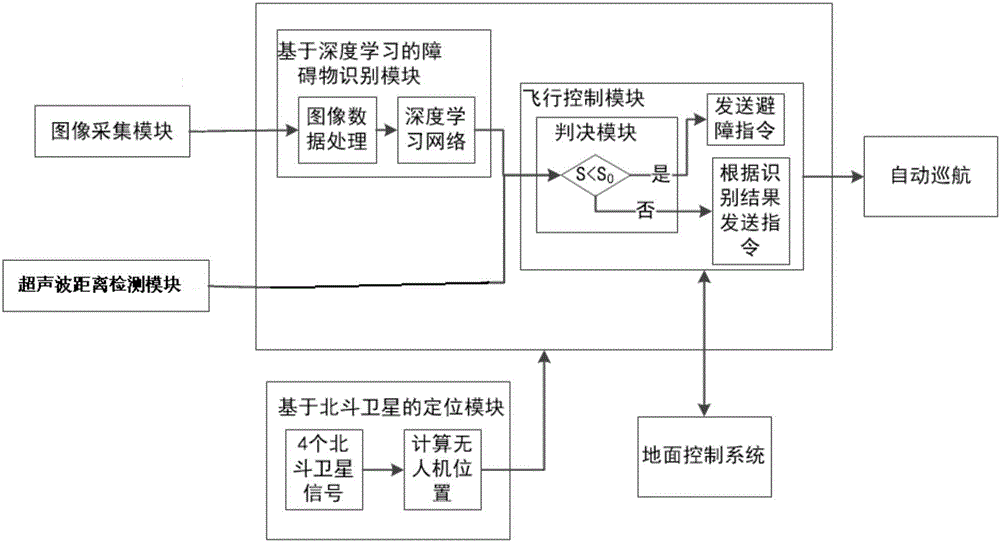
[0041] A kind of automatic cruising system of a rotor UAV based on deep learning designed by the present invention, such as figure 1 As shown, it includes image acquisition module, ultrasonic distance detection module, obstacle recognition module based on deep learning, flight control module and positioning module based on Beidou satellite. The image acquisition module is used to collect the flight environment image of the rotor UAV in real time; the ultrasonic distance detection module is used to detect whether there are obstacles around the rotor UAV and the distance between them; obstacle recognition based on deep learning The module is used to complete the identification of obstacles that remain unchanged for a long time; the flight control module realizes the control of the flight state of the UAV; the positioning ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More