

Artificial human joint
A technology for simulating human body and joints, applied in the field of bionic structure of human body model, it can solve problems as large as 180°, some joints have a certain state of motion as small as less than 20°, and it is difficult to simulate limb joints.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0053] Embodiment 1 Simulated shoulder joint
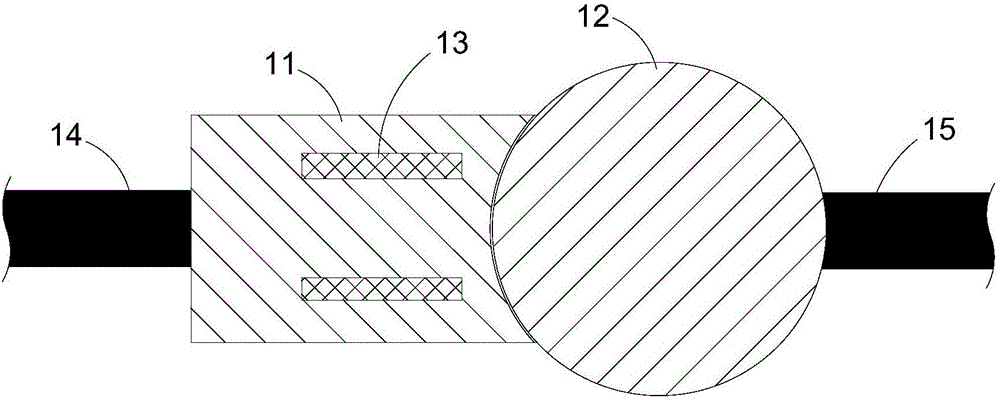
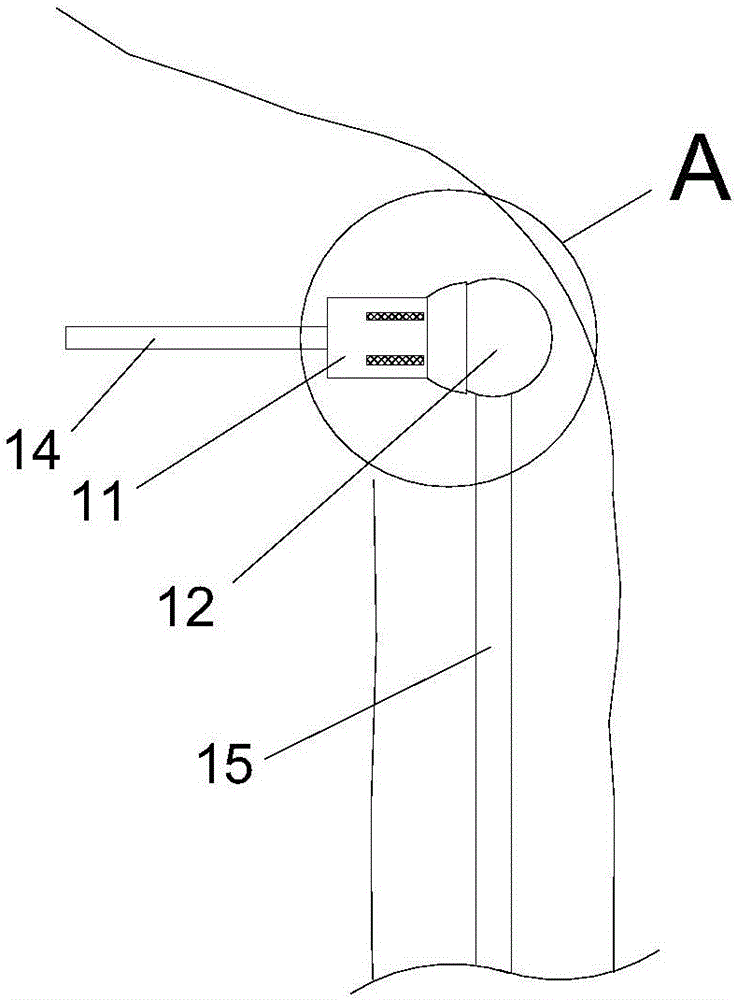
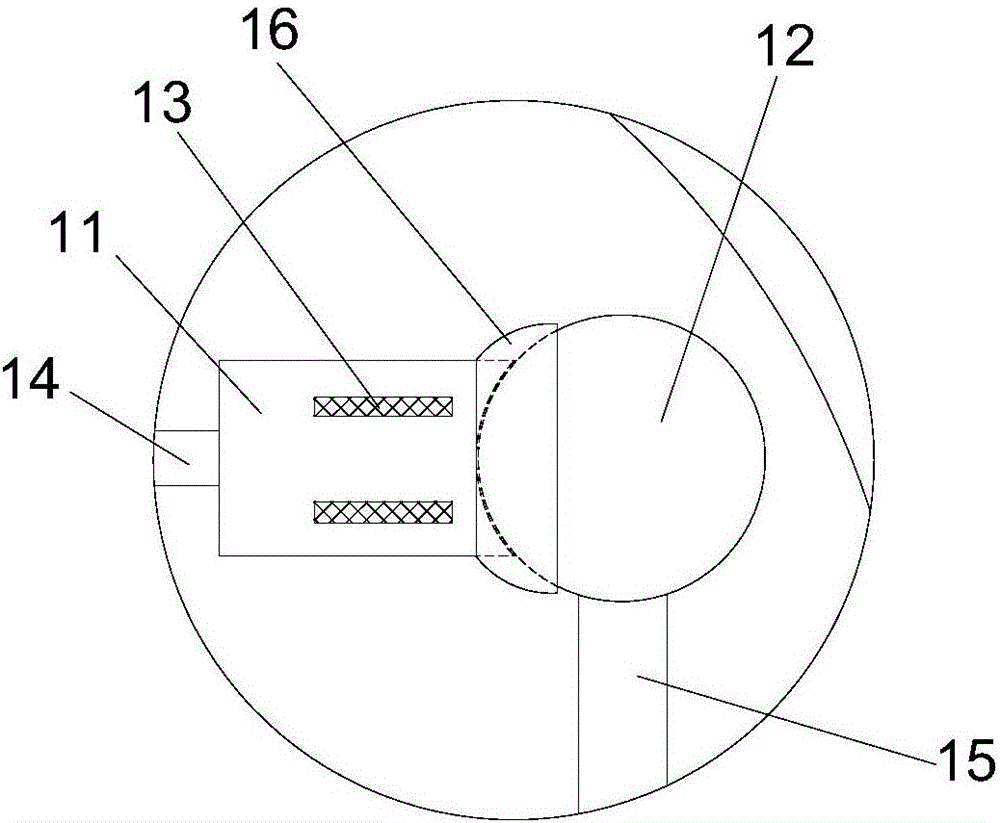
[0054] like figure 2 , image 3 As shown, the simulated human body joint in this embodiment is a simulated shoulder joint, the first simulated bone connector 14 is a simulated scapula connector, the second simulated bone connector 15 is a simulated humerus connector, and the ball socket of the joint ball seat 11 is simulated The glenoid of the scapula, the joint ball 12 is an imitation humeral head; the edge of the glenoid of the scapula is provided with an imitation shoulder joint limiter 16, under the limit action of the imitation shoulder joint limiter 16, the range of motion of the simulated shoulder joint It is: take the humeral joint sagging as the neutral position, the range of motion of joint upward movement is 160°-180°, and the range of motion of joint extension is 40°-60°.
Embodiment 2
[0055] Example 2 Simulated Elbow Joint
[0056] like Figure 4 As shown, when the simulated human body joint of the present embodiment is a simulated elbow joint, the first simulated bone connector 14 is a simulated humerus connector, the second simulated bone connector 15 is a simulated forearm bone connector, and the ball and socket of the joint ball seat 11 For imitating the humerus socket, the joint ball 12 is an imitating forearm bone joint; the edge of the imitating humerus socket is provided with an imitation elbow joint limiter 16, under the limit action of the imitation elbow limiter 16, the activity of the simulated elbow joint is simulated. The range is: take the sagging forearm bone connector as the neutral position, the range of motion of joint flexion is 135°-160°, and the range of motion of joint hyperextension is 0°-20°.
Embodiment 3
[0057] Embodiment 3 Simulated wrist joint
[0058] like Figure 5 As shown, when the simulated human body joint of the present embodiment is a simulated wrist joint, the first simulated bone connector 14 is a simulated forearm bone connector, the second simulated bone connector 15 is a simulated hand bone connector, and the ball of the joint ball seat 11 The nest is an imitation wrist joint disc, and the joint ball 12 is an imitation wrist joint head; the edge of the imitation wrist joint disc is provided with an imitation wrist joint limiter 16, and under the limit action of the imitation wrist joint limiter 16, the simulated wrist joint The range of motion is as follows: the neutral position of the imitation hand bone connector and the imitation forearm bone connector is a straight line, the joint dorsiflexion range is 30°-60°, the joint palm flexion range is 50°-90°, and the joint flexion range is 30°-60°. The range of motion of lateral tilt is 25°-40°, and the range of mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More