

Path-finding robot system and path-finding method based on genetic algorithm
A robotic system and genetic algorithm technology, applied in genetic laws, control/regulation systems, instruments, etc., can solve problems such as the inability to guarantee the calculation efficiency and reliability of path planning, achieve accurate edge threshold detection results, reduce production costs, and connect simple relationship effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0048] All features disclosed in this specification, or steps in all methods or processes disclosed, may be combined in any manner, except for mutually exclusive features and / or steps.
[0049]Any feature disclosed in this specification (including any appended claims, abstract), unless otherwise stated, may be replaced by alternative features that are equivalent or serve a similar purpose. That is, unless expressly stated otherwise, each feature is one example only of a series of equivalent or similar features.
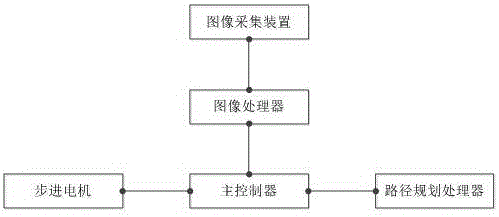
[0050] Embodiment 1 of the present invention provides a pathfinding robot system based on genetic algorithm, the system structure is as follows figure 1 Shown:
[0051] A path-finding robot system based on a genetic algorithm, characterized in that the system includes: an image acquisition device for obtaining original image information of the surrounding environment; An image processor; the image processor signal is connected to the main controller that controls th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More