

Multi-axis aircraft capable of movably flying, flying assisting platform and flying method
A multi-axis aircraft and platform technology, applied in the field of multi-axis aircraft, can solve problems such as difficult take-off and landing, inability to realize mobile take-off and landing, and large loss of kinetic energy, so as to improve safety and reliability, realize mobile take-off, and simplify the structure Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
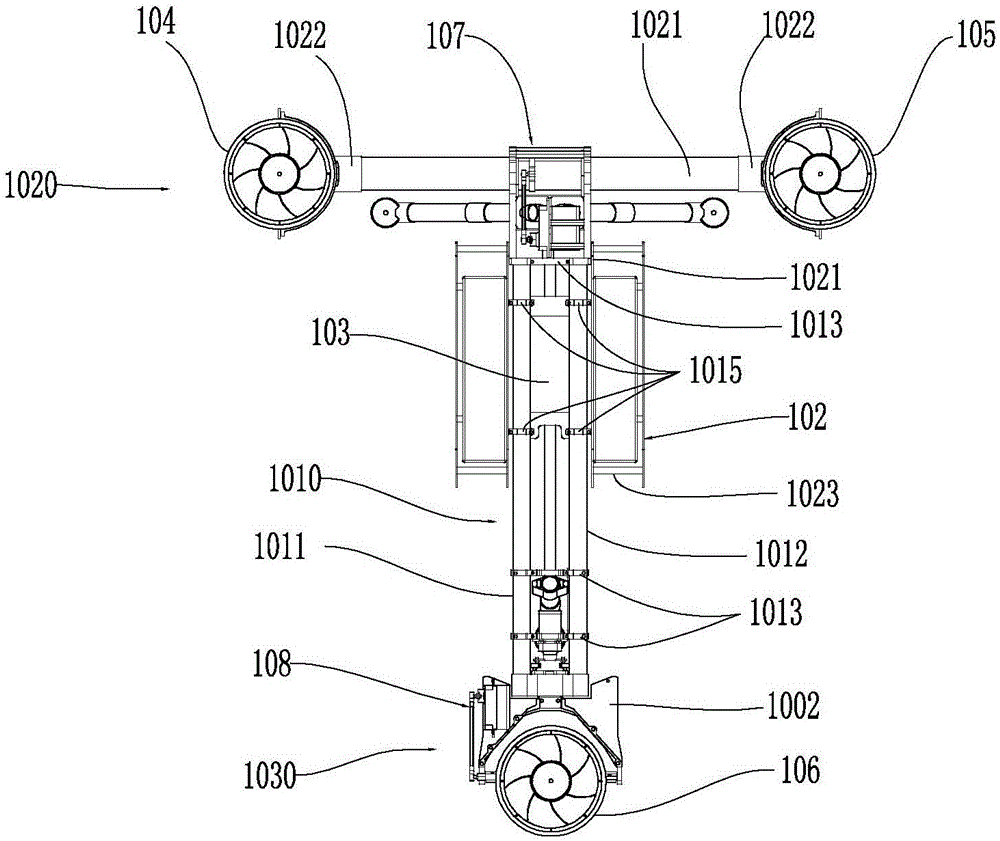
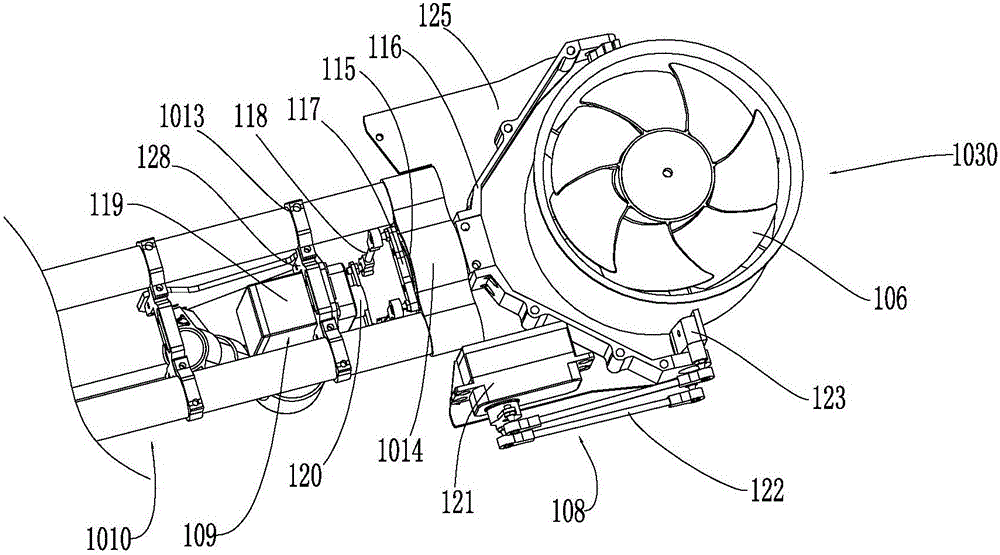
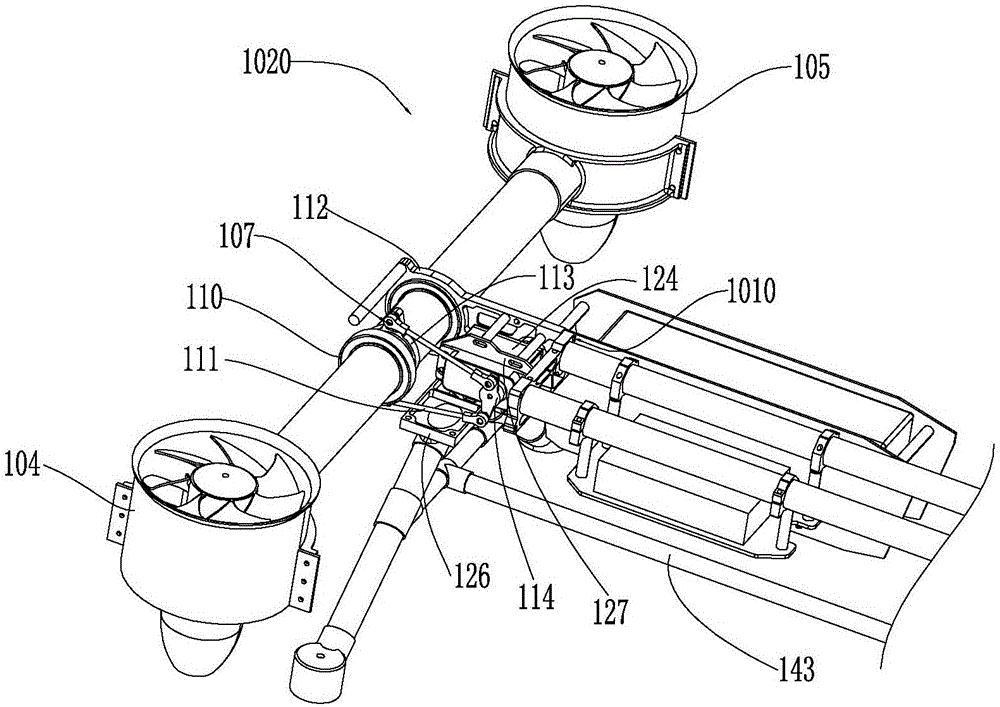
[0060] Such as figure 1 As shown, the multicopter includes a fuselage, a power unit, a tilt drive and a landing gear. The main function of the fuselage is to load power supply, flight control device and other equipment, and at the same time connect the multi-axis aircraft into a whole, including the frame 1010, the flight control tray 103, the battery fixing frame 102, the first machine arm 1020 and the second machine arm 1030. The frame 1010 includes two main pipes 1011 and 1012, a connector 1013 connecting the two main pipes and a casing 130 covering the outside of the main pipes (see image 3 ). The casing can effectively protect the internal components. The flight control tray 103 is used to load the flight control board (not shown in the figure), and is fixed on the frame 1010 through the pipe clamp 1015 . The battery fixing frame 102 is used to load the battery, and is symmetrically fixed on both sides in the width direction of the frame 1010 by screws, and the fixin...
Embodiment 2
[0069] The difference between this embodiment and the first embodiment lies in the first tilting driving device and the second tilting driving device.
[0070] Such as Figure 5 As shown, the first tilting drive device 200 includes: a fixed frame 201, a steering gear 202, a steering gear output synchronous pulley 203, a synchronous belt 204, and a synchronous pulley 205, and the first end of the fixed frame 201 is rotatably supported by a bearing 206. The first machine arm 2020, the second end opposite to the first end of the fixed frame 201 is connected with the frame 2010 by screws, the third end of the fixed frame 201 located on the lower side is connected with the tripod by screws, and the steering gear 202 is positioned by The column is connected with the fixed frame 201, and the steering gear output synchronous pulley 203 is connected with the synchronous pulley 205 fixed on the first machine arm 2020 through the synchronous belt 204, so that the first machine arm 2020 t...
Embodiment 3
[0073] The difference between this embodiment and the first embodiment lies in the first tilting driving device and the second tilting driving device, that is, the driving mechanism for tilting the power unit toward the moving direction or the direction of the airflow.
[0074] Such as Figure 7As shown, the platform 400 for assisting the movement and take-off of the multi-axis aircraft includes a movable frame 404 capable of tilting between the horizontal and a predetermined tilt angle. The movable frame 404 made of iron material is used as the fixing part of the fixing part 407 for fixing the multi-axis aircraft, on which a mechanical locking mechanism 420 for fixing the multi-axis aircraft is arranged. The platform 400 also includes a movable frame tilt driving device 403 that drives the movable frame 404 to tilt between the horizontal and a predetermined tilt angle, and the movable frame tilt driving device 403 may be an electric cylinder or a hydraulic cylinder. The plat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More