

Space manipulator trajectory tracking control method based on cross-scale model
A space manipulator, trajectory tracking technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as suboptimal control, affecting calculation speed, and complex adaptive law, so as to suppress influence, Guaranteed bounded effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
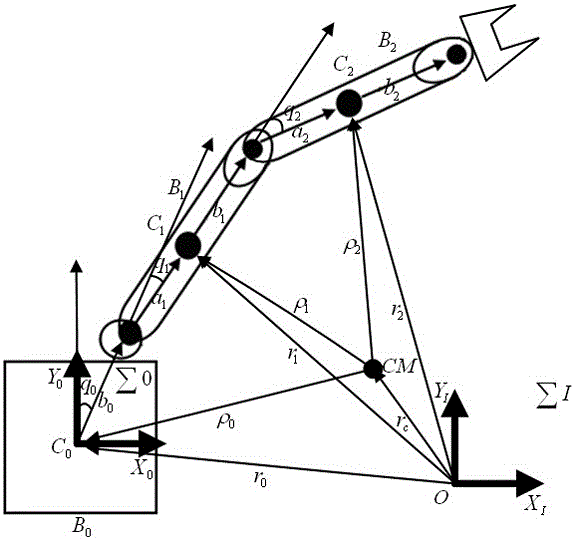
[0026] The planar 2-link space manipulator model is as follows figure 1 , consisting of a free-floating motion base B 0 and two booms B 1 , B 2 composition.
[0027] The dynamic parameters of the space manipulator system are described in Table 1. The vector composed of the initial position and attitude angle of the base and the initial attitude angles of link 1 and link 2 is [q b ,q s ] T =[x,y,q 0 ,q 1 ,q2 ] T , the initial velocity vectors of the base and connecting rod 1 and connecting rod 2 are The initial values of various parameters and expected trajectory are shown in Table 2.
[0028] Table 1 Parameters of the planar 2-link space manipulator system
[0029]
[0030] Table 2 Initial values of neural network adaptive control simulation for space manipulator
[0031]
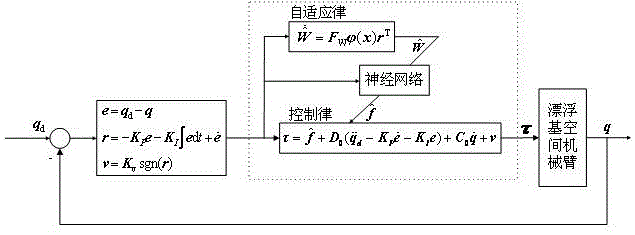
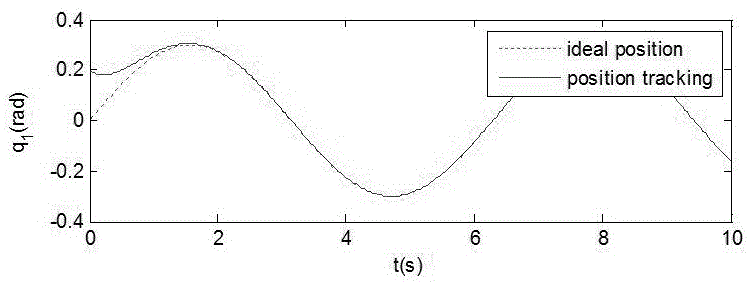
[0032] Set the control parameter to K P =diag{100,100,100,100,100},K I =diag{250,250,250,250,250},K v =0.2, F W =diag{0.0005,0.0005,0.0005,0.0005,0.0005}, according to figure 2 T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More